

Win10_VSCode_Go环境配置
一、环境配置
1.1 安装Golang
链接:golang.google.cn/dl/
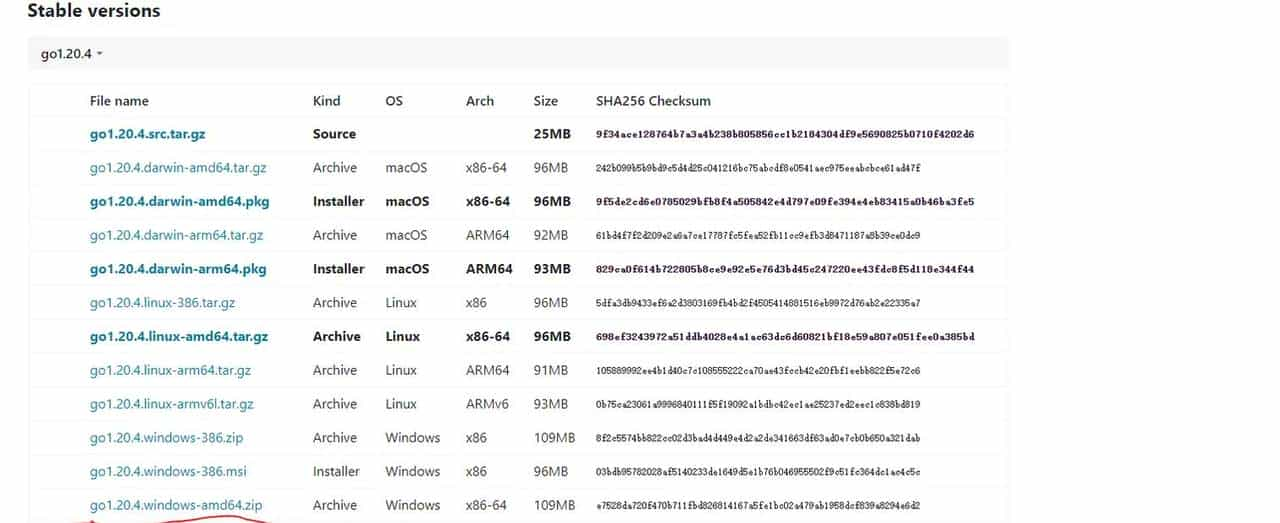
下载完成运行,安装到指定路径
检查:在cmd或者powershell上,输入命令
shell复制代码go version

1.2 配置GOPATH环境变量
GOPATH 是之后项目下载依赖包的存放路径。Go 语言目前都是使用 Go Modules 管理依赖,在使用 Go Modules 时,Go 会把下载的依赖包存储在 GOPATHpkgmod 中
在安装 Go1.20.3 时已经自动配置好 GOPATH 了,但是默认情况下在C盘,所以之后下载的外部依赖包也就存放在C盘。我们可以更改 GOPATH 到其他位置
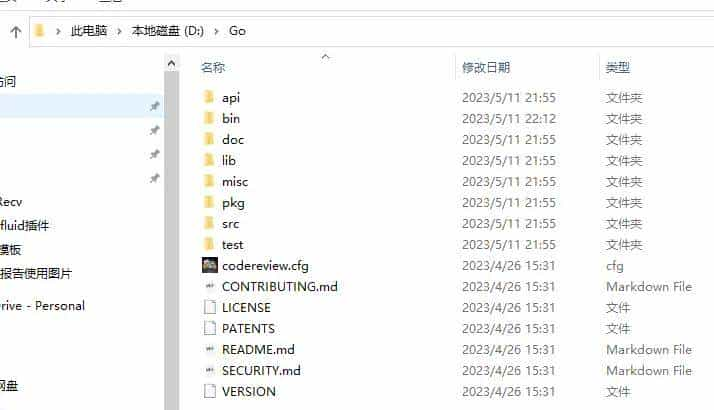
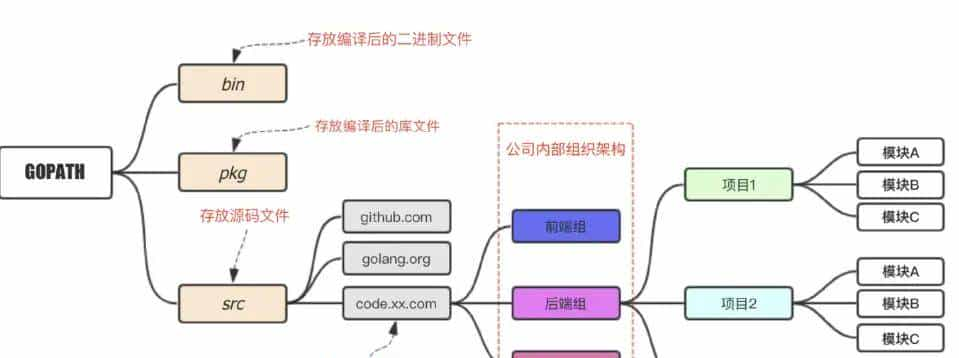
GOPATH目录一般为:
1、bin 存放编译生成的二进制文件。列如 执行命令 go get github.com/google/gops,bin目录会生成 gops 的二进制文件。
2、pkg 其中pkg下面以下三个文件夹。
XX_amd64: 其中 XX 是目标操作系统,列如 mac 系统对应的是darwin_amd64, linux 系统对应的是 linux_amd64,存放的是.a结尾的文件。 mod: 当开启go Modules 模式下,go get命令缓存下依赖包存放的位置 sumdb: go get命令缓存下载的checksum数据存放的位
3、src 存放golang项目代码的位置
GOPATH 模式下没有版本控制的概念,在执行 go get 的时候,获取的永远是最新的依赖包,并下载到 GOPATH/src 目录下,如果你有两个工程依赖一个包的 v1 和 v2 版本,则会发生冲突,由于 GOPATH 模式下两个工程内依赖的导入路径都是一样的,因此两个工程获取的都是 v2 版本。
1.3 Go Modules 模式
Go Modules 发布于 Go1.11,成长于 Go1.12,丰富于 Go1.13,正式于 Go1.14 推荐在生产上使用。
在 Go Modules 模式下,所有依赖的包存放在 GOPATH/pkg/mod 目录下,所有第三方二进制可执行文件放在 GOPATH/bin 目录下,且工程项目可以放在 GOPATH/src 路径之外,但要求项目中需要有 go.mod 文件(该文件可以通过 go mod init 命令初始化得到)。
在有了 Go Modules 之后,GOPATH 和 Go Modules 就分别负责不同的职责,共同为 Golang 项目服务:
- GOPATH 用来存放我们从网上拉取的第三方依赖包。
- Go Modules 用来存放我们自己的 Golang 项目文件,当自己的项目需要依赖第三方的包的时候,我们通过 Go Modules 目录下的一个 go.mod 文件来引用 GOPATH/pkg/mod 文件夹下的第三方依赖即可。
这样一来,既解决了原来只能局限在 GOPATH/src 下进行编程的问题,也解决了第三方依赖包难以管理和重复依赖占用磁盘空间的问题。总而言之,在引入 Go Modules 之后,我们不会直接在 GOPATH 目录下进行编程,而是把 GOPATH 作为一个第三方依赖包的仓库,我们真正的工作空间在 Go Modules 目录下。
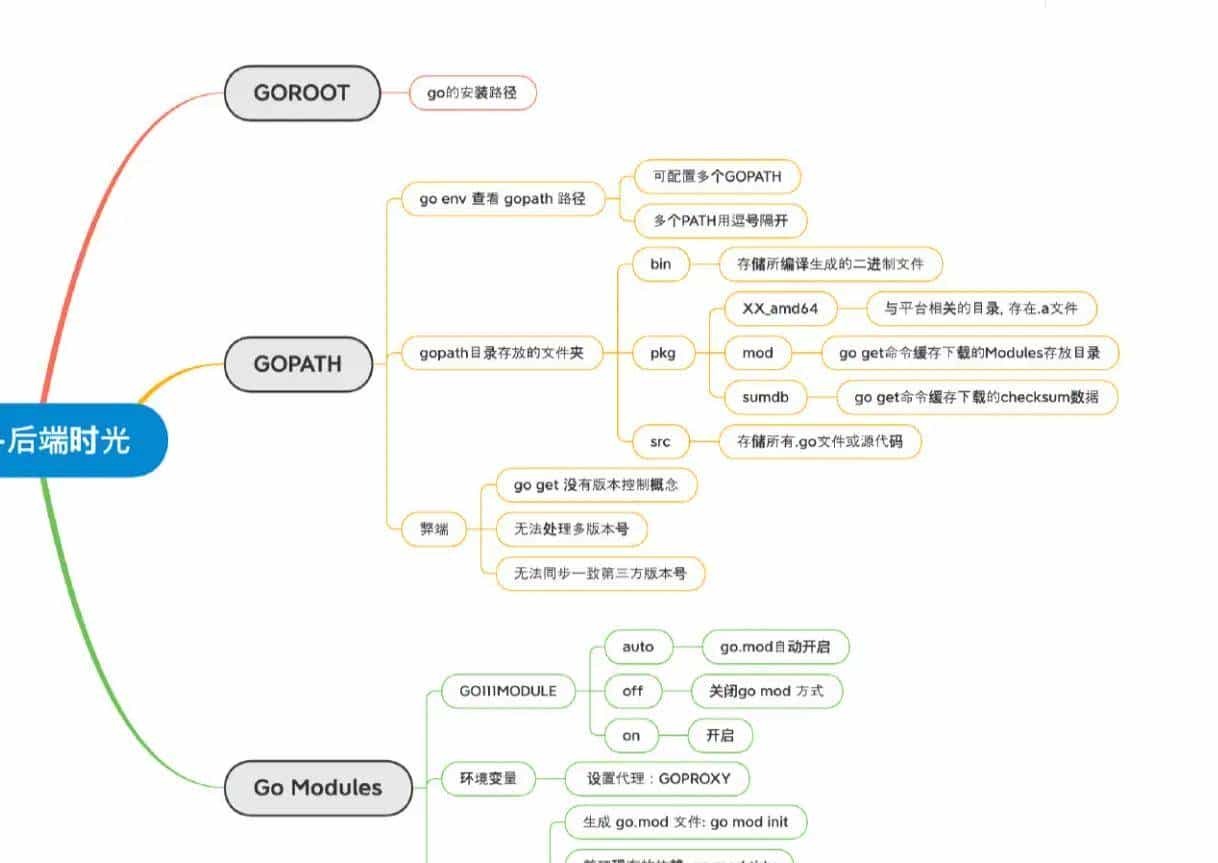
开启 Go Modules 功能的命令如下:
shell复制代码go env -w GO111MODULE=on
2.3 GOPROXY
GOPROXY 主要用于设置 Go 模块代理,其作用是使 Go 在后续拉取模块版本时直接通过镜像站点来快速拉取。
GOPROXY 的默认值是 https://proxy.golang.org,direct,在国内无法访问。
因此,这里推荐使用七牛云的代理:goproxy.cn/
设置七牛云代理的命令如下:
shell复制代码go env -w GOPROXY=https://goproxy.cn,direct
“direct” 是一个特殊指示符,用于指示 Go 回源到模块版本的源地址去抓取(列如 GitHub 等),场景如下:当值列表中上一个 Go 模块代理返回 404 或 410 错误时,Go 自动尝试列表中的下一个,遇见 “direct” 时回源,也就是回到源地址去抓取,而遇见 EOF 时终止并抛出类似 “invalid version: unknown revision…” 的错误。
最终的环境配置如下:
shell复制代码Microsoft Windows [版本 10.0.19045.2965]
(c) Microsoft Corporation。保留所有权利。
C:Users86159>go env
set GO111MODULE=on
set GOARCH=amd64
set GOBIN=D:\Go\bin
set GOCACHE=C:Users86159AppDataLocalgo-build
set GOENV=C:Users86159AppDataRoaminggoenv
set GOEXE=.exe
set GOEXPERIMENT=
set GOFLAGS=
set GOHOSTARCH=amd64
set GOHOSTOS=windows
set GOINSECURE=
set GOMODCACHE=D:GOPATHpkgmod
set GONOPROXY=
set GONOSUMDB=
set GOOS=windows
set GOPATH=D:GOPATH
set GOPRIVATE=
set GOPROXY=https://goproxy.cn,direct
set GOROOT=D:Go
set GOSUMDB=sum.golang.org
set GOTMPDIR=
set GOTOOLDIR=D:Gopkg oolwindows_amd64
set GOVCS=
set GOVERSION=go1.20.4
set GCCGO=gccgo
set GOAMD64=v1
set AR=ar
set CC=gcc
set CXX=g++
set CGO_ENABLED=1
set GOMOD=NUL
set GOWORK=
set CGO_CFLAGS=-O2 -g
set CGO_CPPFLAGS=
set CGO_CXXFLAGS=-O2 -g
set CGO_FFLAGS=-O2 -g
set CGO_LDFLAGS=-O2 -g
set PKG_CONFIG=pkg-config
set GOGCCFLAGS=-m64 -mthreads -Wl,--no-gc-sections -fmessage-length=0 -fdebug-prefix-map=C:Users86159AppDataLocalTempgo-build12665588=/tmp/go-build -gno-record-gcc-switches
二、VSCode
- 安装VSCode,链接:code.visualstudio.com
- VSCode中插件安装
快捷键CTRL+shift+p,打开
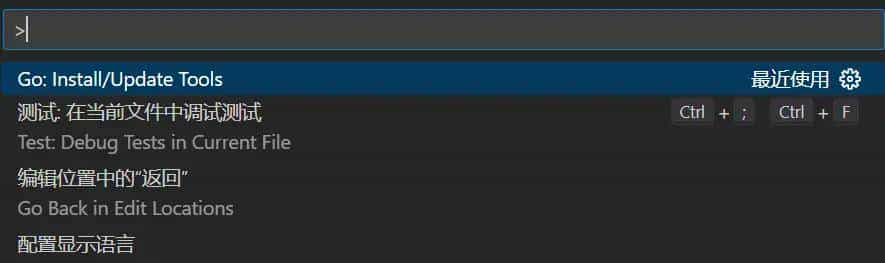
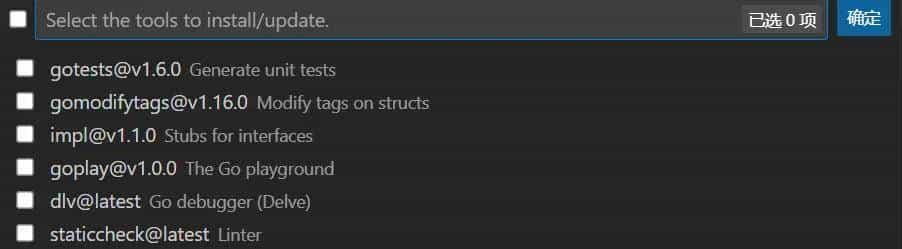
找到并点击 Go:install/Update Tools
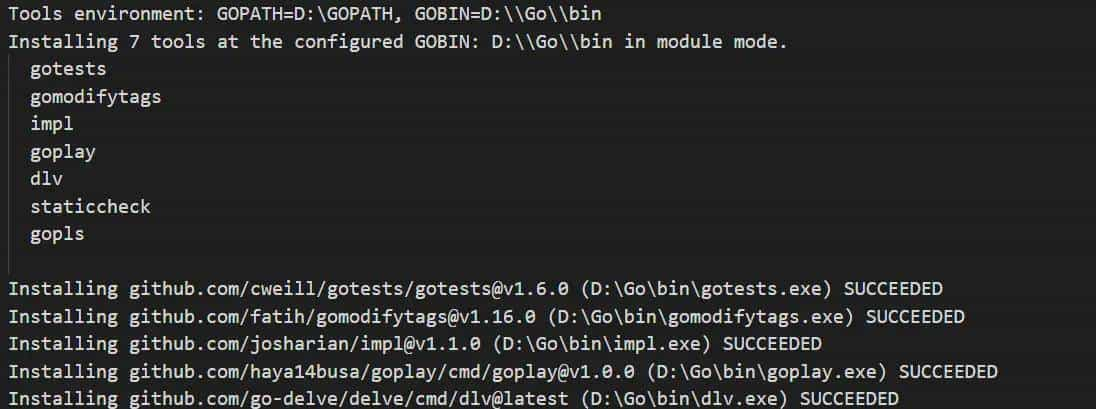
安装成功:
参考博客:
blog.csdn.net/luosisan/ar…
blog.csdn.net/qq_42815188…
blog.csdn.net/rouyiou/art…
链接:
https://juejin.cn/post/7233605431494115389
© 版权声明
文章版权归作者所有,未经允许请勿转载。











收藏了,感谢分享