

目录
第一部分:范式转移与理论基石
第一章:绪论——GIS的“工具箱”困境与“智能大脑”曙光
1.1 “工具驱动”的困境:效率、门槛与洞察力的“三重枷锁”
1.2 “意图驱动”的内涵:从“如何做”到“做什么”的升维
1.3 项目主线:以“城市新区可持续发展规划”为例
第二章:核心技术解密——驱动“智能大脑”的三大支柱
2.1 支柱一:地理空间自然语言理解——听懂“人话”的GIS
2.2 支柱二:复杂地理推理引擎——构建“因果链”的思考者
2.3 支柱三:生成式规划与优化——不止于分析,更在于创造
2.4 技术融合:从三大支柱到一体化决策智能体
第三章:阶段一:意图解析与任务分解——将“蓝图”翻译为“施工图”
3.1 意图输入:从模糊愿景到结构化目标
3.2 Geo-NLU引擎:深度解析空间意图与约束
3.3 知识图谱构建:为城市要素建立“关系网”
3.4 自动化工作流生成:从意图到可执行的分析DAG
第四章:阶段二:多模态深度分析——洞察城市的“脉搏”
4.1 数据融合引擎:汇聚天、空、地一体化信息流
4.2 执行分析工作流:多任务协同与并行计算
4.3 洞察发现:从数据到知识,再到叙事性报告
4.4 交互式探索:让决策者与数据“对话”
第五章:阶段三:方案生成与多目标优化——在“可能性”中寻找“最优解”
5.1 生成式土地利用规划:AI“规划师”的初步构想
5.2 多目标函数定义:量化“可持续发展”
5.3 优化算法与帕累托前沿:寻找“不后悔”的决策空间
5.4 情景模拟与推演:预见未来的“水晶球”
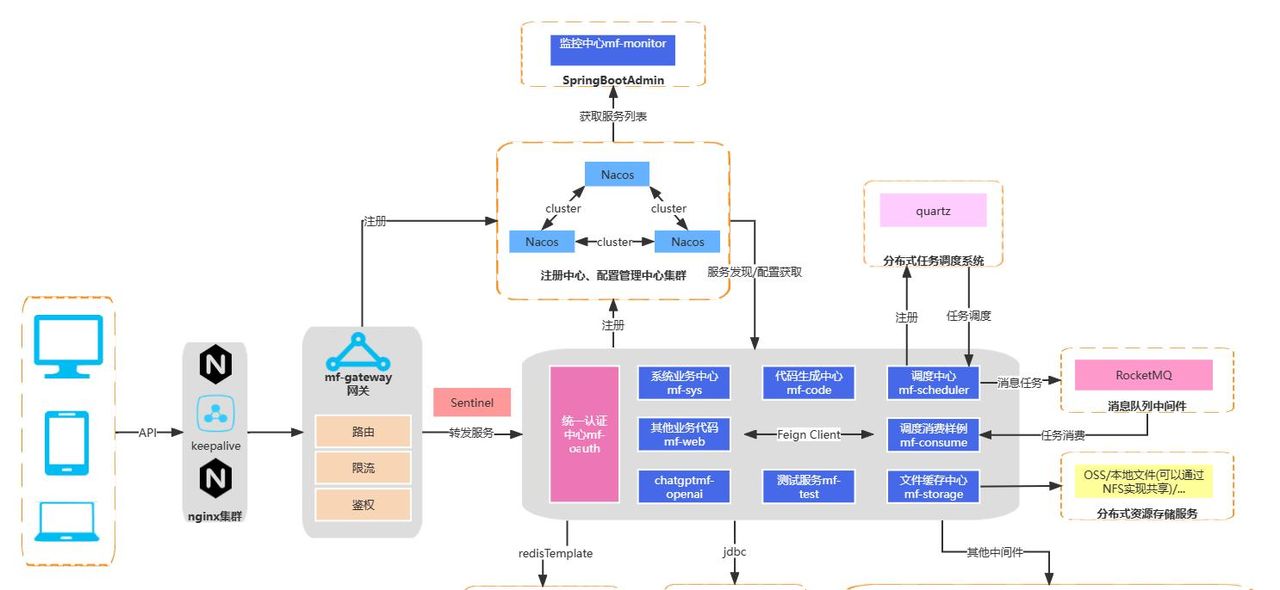
第六章:平台化架构——打造可持续演进的“城市大脑”
6.1 微服务与云原生架构:弹性、可扩展的技术底座
6.2 核心功能模块:意图网关、分析引擎、方案库与知识库
6.3 人机协同界面:从“仪表盘”到“战略指挥舱”
6.4 系统评估与持续学习
第七章:未来展望与挑战
7.1 技术挑战:黑箱问题、数据偏见与算力鸿沟
7.2 伦理与社会挑战:算法决策的责任与公众参与
7.3 终极形态:从“决策支持”到“自主智能体”
结论
第一部分:范式转移与理论基石
第一章:绪论——GIS的“工具箱”困境与“智能大脑”曙光
地理信息系统(GIS)自诞生以来,其核心价值始终在于为空间决策提供支持。它如同一个功能强大的“工具箱”,里面装满了缓冲区、叠加、网络分析、栅格计算等各式各样的专业工具。几十年来,无数城市规划师、地理学家、环境科学家依靠这个工具箱,将杂乱的数据转化为有价值的地图和洞察,解决了无数实际问题。然而,随着我们面临的问题日益复杂化、动态化和跨学科化,这个传统的“工具驱动”范式正暴露出其固有的局限性,一场深刻的范式转移已迫在眉睫。
1.1 “工具驱动”的困境:效率、门槛与洞察力的“三重枷锁”
“工具驱动”的范式,本质上是**“以工具为中心”**的。用户必须首先理解问题,然后将其拆解为一系列GIS工具能够执行的子任务,再按正确顺序依次操作,最后将各个工具的输出结果进行人工整合与解读。这个过程,给现代决策支持戴上了三重沉重的枷锁。
第一重枷锁:低下的效率与割裂的流程
一个复杂的空间分析问题,例如“评估城市新区不同公共交通方案对房价、就业可达性和碳排放的综合影响”,在传统GIS工具箱中,是一个漫长而繁琐的旅程。
流程割裂:分析师需要首先使用网络分析工具计算每个地块的可达性;然后使用地理加权回归(GWR)或 hedonic 模型工具分析可达性对房价的影响;接着,需要调用交通排放模型计算碳排放;最后,手动将这三张结果图在Photoshop或Illustrator中进行叠加、制图和排版。整个过程涉及多个软件、多个工具,数据在不同工具间流转,极易出错且难以追溯。
效率瓶颈:每一步操作都需要人工设置参数、等待计算、检查结果。一个完整的分析周期,短则数天,长则数周。这种效率无法支持决策的实时性和敏捷性要求,更无法进行大规模的情景模拟和方案比选。
第二重枷锁:高昂的专业门槛与知识壁垒
要熟练运用GIS这个“工具箱”,用户需要经过长期的专业训练,不仅要掌握软件操作,更要理解其背后的地理学、测绘学和统计学原理。
知识鸿沟:这导致了一个悖论:最了解问题本质的领域专家(如城市规划师、经济学家),往往不是最擅长使用GIS工具的人;而GIS技术专家,又往往缺乏对特定领域问题的深刻理解。决策的意图在从“专家”到“GIS分析师”的传递过程中,不可避免地会出现信息损耗和偏差。
应用受限:高昂的门槛极大地限制了GIS的普及和应用广度。对于政府决策者、企业管理者、公众等非专业用户,GIS工具箱如同一个“黑箱”,他们只能被动地接受分析师给出的最终结论,而无法亲自探索数据、验证假设,参与决策过程。
第三重枷锁:表层的分析与缺失的洞察
“工具驱动”的范式,本质上是在回答“What”(是什么)和“Where”(在哪里),但很难回答“Why”(为什么)和“What if”(如果……会怎样)。
缺乏因果推理:传统GIS分析大多是相关性分析,而非因果性分析。它能告诉你“A和B在空间上相关”,但很难解释“A是否导致了B”。例如,它能发现地铁站周边房价高,但无法量化“是地铁站导致了房价高,还是高房价区域规划了地铁站”。这种因果链条的缺失,使得决策支持停留在“知其然,而不知其所以然”的表层。
缺乏方案生成能力:工具箱是“分析性”的,而非“生成性”的。它可以评估一个给定的方案,但无法主动创造出新的、更优的方案。它是一个“评委”,而不是一个“设计师”。在面对开放性、创造性的规划任务时,它显得无能为力。
这“三重枷锁”共同构成了传统GIS的“不可能三角”,即易用性、分析深度与创造性难以兼得。要打破这个僵局,我们需要一场从“以工具为中心”到“以人为中心”,再到“以意图为中心”的根本性变革。
1.2 “意图驱动”的内涵:从“如何做”到“做什么”的升维
“意图驱动”的范式,是解决上述困境的终极答案。它将GIS从一个被动的“工具箱”,提升为一个主动的、具备认知和推理能力的“智能大脑”。其核心内涵体现在以下三个层面:
交互层面:从“操作语言”到“自然语言”
在“意图驱动”模式下,用户不再需要学习复杂的工具操作。他们可以用最自然、最符合思维习惯的方式——自然语言——来向系统表达自己的意图。
从“点、线、面”到“故事”:用户不再是说“对道路做500米缓冲区,然后与住宅区叠加”,而是直接说:“我想知道哪些区域的居民,可以在15分钟内步行享受到公园、学校和社区医院等公共服务。”
意图的完整性:这种表达方式,包含了目标(享受服务)、约束(15分钟步行)、对象(居民、公园、学校、医院)等完整的语义信息,更接近人类思考和沟通的本质。
处理层面:从“任务执行”到“任务分解与规划”
“智能大脑”的核心能力,在于它能理解用户的“意图”,并自主地将其分解为一个可执行的分析计划。
自动工作流生成:当系统接收到上述意图后,它会自动进行“思考”:
识别实体:识别出“居民”、“公园”、“学校”、“医院”等地理实体。
理解关系:理解“15分钟步行”是一个时空约束,需要用到网络分析。
规划步骤:自动生成一个分析工作流:① 获取所有居住用地数据;② 获取所有公共服务设施数据;③ 构建步行网络数据集;④ 以每个居住地块为起点,进行网络分析,计算15分钟可达范围;⑤ 将可达范围与设施点进行空间连接;⑥ 汇总统计,生成最终的服务覆盖地图和报告。
从“执行者”到“规划者”:系统的角色,从一个被动等待指令的“执行者”,转变为一个能够自主规划路径的“规划者”。
输出层面:从“数据结果”到“决策洞察”
“智能大脑”的最终输出,不再是一堆冰冷的图层和表格,而是直接面向决策的、可行动的洞察和建议。
叙事性报告:系统会自动生成一份图文并茂的分析报告,用自然语言解释分析过程和发现:“分析显示,新区东部约80%的居民能够满足15分钟生活圈要求,而西部由于缺乏社区医院,覆盖率仅为40%。建议在西部A地块或B地块优先规划一所社区医院,预计可将整体覆盖率提升至65%。”
方案生成与优化:更进一步,系统不止于分析现状,它还能基于分析发现,主动生成多个规划方案(如在A地块或B地块建医院),并从成本、效益、公平性等多个维度进行评估和优化,为决策者提供一组“选择题”而非一道“问答题”。
“意图驱动”的本质,是将人类从繁琐的“How”(如何做)中解放出来,让我们能更专注于“What”(做什么)和“Why”(为什么)。这是人机协同的终极形态,也是GIS进化的必然方向。
1.3 项目主线:以“城市新区可持续发展规划”为例
为了将“意图驱动”这一抽象概念具象化、可操作化,本文选择“城市新区可持续发展规划”项目作为贯穿全文的主线案例。这个项目是展示“智能大脑”价值的绝佳舞台,因为它是一个典型的、高度复杂的、多目标的决策问题。
项目背景与挑战
某国家级新区计划在一片20平方公里的土地上,规划建设一个全新的城市片区。该项目的目标,是打造一个产城融合、生态宜居、智慧高效的可持续发展典范。然而,这个宏大的愿景背后,是无数个相互交织、甚至相互冲突的子目标:
经济目标:最大化土地经济效益,吸引高新产业,创造就业岗位。
社会目标:实现职住平衡,保障公共服务均等化,构建15分钟生活圈。
环境目标:保护现有生态廊道,最大化绿地与蓝网,实现碳中和。
交通目标:优先发展公共交通,构建TOD(Transit-Oriented Development)模式,缓解交通拥堵。
传统规划模式的“无力感”
在传统的“工具驱动”模式下,规划师团队需要花费数月甚至数年时间,进行大量的数据收集、人工分析和方案比选。他们通常只能提出2-3个有限的备选方案,且难以全面、量化地评估每个方案在所有目标上的综合表现。整个过程效率低下、成本高昂,且极易受到规划师个人经验和知识局限的影响,无法保证找到全局最优或接近最优的解。
“意图驱动”的宏伟蓝图
面对这个挑战,我们将构建一个“意图驱动”的智能空间决策支持系统。在这个系统中,规划总监不再需要向GIS分析师下达一系列具体的分析指令。他只需要向系统输入一个高层级的战略意图:
“请为这个20平方公里的新区,生成一个以‘15分钟生活圈’和‘TOD’为核心理念的可持续发展规划方案。请优先考虑生态保护,并确保职住比不低于0.8。请提供至少5个不同的方案,并从经济、社会、环境三个维度进行综合评估。”
接收到这个意图后,我们的“智能大脑”将自动启动,完成从意图解析、深度分析、方案生成到多目标优化的全流程,最终为决策者呈现一组经过科学评估的、多样化的、可供选择的规划蓝图,并附上详尽的利弊分析和推演结果。
接下来的章节,我们将围绕这个项目,详细拆解如何一步步构建这个强大的“智能大脑”。
第二章:核心技术解密——驱动“智能大脑”的三大支柱
如果说“意图驱动”是我们为GIS设定的宏伟目标,那么要实现这一目标,就必须为其构建一个全新的技术内核。这个内核不再是传统GIS中孤立的工具集合,而是一个由三大核心技术支柱紧密耦合而成的有机整体。它们分别是:负责“听懂”人话的地理空间自然语言理解、负责“思考”分析路径的复杂地理推理引擎,以及负责“创造”解决方案的生成式规划与优化。这三大支柱共同构成了GIS“智能大脑”的认知、推理与创造能力。
2.1 支柱一:地理空间自然语言理解——听懂“人话”的GIS
“意图驱动”的第一步,是让机器能够理解人类以自然语言表达的意图。然而,通用的自然语言理解(NLU)模型在面对地理空间问题时,往往会“水土不服”。它不知道“北京烤鸭”和“北京路”的区别,也无法理解“步行15分钟”背后蕴含的网络分析需求。因此,我们需要一个专门为地理空间领域定制的NLU能力——地理空间自然语言理解。
核心挑战:地理语言的“模糊性”与“结构性”
地理语言充满了模糊性,同时又蕴含着严谨的空间结构。
模糊性:“市中心附近”、“交通拥堵的路段”、“环境较好的区域”,这些描述都依赖于上下文和个人认知。
结构性:“从A点沿B路向东走500米,然后左转进入C路”,这是一个严格的空间操作序列。“A在B的内部,且与C相邻”,这是一个清晰的空间拓扑关系。
Geo-NLU的核心任务,就是将这种模糊、自然的语言,精确地翻译成机器可以理解和执行的结构化指令。
可操作的Geo-NLU技术栈
一个实用的Geo-NLU系统,通常由以下几个层次构成:
基础NLU层:意图与槽位识别
意图识别:判断用户想要做什么。例如,用户输入“分析一下房价和地铁的关系”,系统应识别出意图是“相关性分析”。
槽位填充:提取意图中的关键信息(槽位)。例如,在上述句子中,“房价”和“地铁”就是两个关键槽位。这通常可以通过BERT、RoBERTa等预训练语言模型的微调来实现。
地理实体识别与链接
这是Geo-NLU的核心。它不仅要识别出文本中的地理实体,还要将它们链接到真实的地理数据库中。
实体识别:识别出“北京路”、“中央公园”、“高新区”等。
实体链接:这是关键一步。当系统识别出“中央公园”后,它需要在一个包含所有公园的地理数据库(如一个
park_polygons.gpkg
可操作实现:
构建地理词典:首先,为所有地理要素建立一个“别名-唯一ID”的映射词典。
空间消歧:当存在多个同名实体时(如全国有多个“人民公园”),可以利用上下文信息(如“我们市的人民公园”)或用户当前关注的空间范围,进行消歧。
示例:用户说“分析一下XX新区中央公园周边的房价”。系统识别出“中央公园”后,会自动在
XX_new_district_parks.gpkg
park_001
空间关系与度量解析
这一层负责将定性的空间描述和度量,转化为定量的GIS参数。
空间关系解析:将“内部”、“相邻”、“穿过”、“500米范围内”等拓扑和距离关系,解析为GIS中的空间谓词,如
ST_Within
ST_Touches
ST_DWithin
度量解析:将“步行15分钟”、“车程5公里”等,解析为网络分析或欧氏距离分析的参数。这需要一个规则库或一个小型分类模型。
可操作实现:
# 伪代码:度量解析器
def parse_metric(text):
if "步行" in text and "分钟" in text:
time = extract_number(text)
return {"type": "network_distance", "mode": "walk", "impedance": time}
elif "车程" in text and "公里" in text:
distance = extract_number(text) * 1000
return {"type": "euclidean_distance", "radius": distance}
# ... 更多规则 输出:结构化的意图表示
Geo-NLU的最终输出,是一个标准化的、机器可读的JSON对象,它精确地描述了用户的意图。
示例:对于意图“找出所有未被公园15分钟步行覆盖的住宅区”,Geo-NLU的输出可能是:
{
"intent": "find_uncovered_areas",
"target_entity": {
"type": "land_use",
"class": "residential",
"source_layer": "land_use_parcels.gpkg"
},
"covering_entity": {
"type": "facility",
"class": "park",
"source_layer": "parks.gpkg"
},
"spatial_constraint": {
"type": "network_analysis",
"mode": "walk",
"max_impedance": 900, // 15分钟 * 60秒
"network_dataset": "walk_network.gpkg"
},
"logical_operator": "NOT" // 关键逻辑:未被覆盖
}这个JSON对象,就是用户意图的“数字孪生”,是下一阶段推理引擎的直接输入。
2.2 支柱二:复杂地理推理引擎——构建“因果链”的思考者
如果说Geo-NLU是“耳朵”,那么复杂地理推理引擎就是“大脑”。它接收结构化的意图,并像一位经验丰富的地理分析师一样,自主地规划出一条从问题到答案的、严谨的、可执行的“思考路径”。
核心能力:从“What”到“How”的转换
推理引擎的核心任务,是将高层次的、目标导向的意图,分解为一个低层次的、由原子化GIS操作组成的有向无环图(DAG)。
原子化操作:指最基本的、不能再分割的GIS功能,如
ST_Buffer
ST_Intersection
NetworkAnalyst.Solve
RasterCalculator
DAG(有向无环图):定义了各个操作之间的执行顺序和数据依赖关系。例如,操作B的输入,是操作A的输出。
可操作的推理引擎构建
构建一个强大的推理引擎,离不开一个“知识库”和一个“推理机”。
构建地理知识图谱
知识图谱是推理引擎的“知识库”,它以图的形式存储了地理概念、GIS功能以及它们之间的关系。
节点类型:
地理实体类:
ResidentialArea
Park
MetroStation
River
GIS功能:
BufferAnalysis
NetworkAnalysis
OverlayAnalysis
ProximityAnalysis
数据源:
LandUseLayer
RoadNetworkLayer
POILayer
关系类型:
hasFeature
ResidentialArea
LandUseLayer
canBeAnalyzedBy
find_uncovered_areas
OverlayAnalysis
requiresInput
OverlayAnalysis
NetworkAnalysis
可操作构建:可以使用RDF三元组和Apache Jena等图数据库来存储和管理这个知识图谱。
基于规则的推理机
推理机是“思考”的执行者。它接收Geo-NLU输出的JSON,然后在知识图谱上进行查询和匹配,生成DAG。
推理过程(以上述JSON为例):
识别目标:推理机看到
target_entity
residential
ResidentialArea
LandUseLayer
class='residential'
Task1: Select Features from land_use_parcels.gpkg where class='residential'
识别约束:看到
spatial_constraint
network_analysis
covering_entity
network_dataset
Task2: Select Features from parks.gpkg
规划核心分析:推理机知道,要计算“15分钟步行覆盖”,需要执行网络分析。于是,DAG的第三个节点生成:
Task3: NetworkAnalysis (Service Area) using Task1's output as origins, Task2's output as facilities, and walk_network.gpkg
执行逻辑操作:最后,为了找到“未被覆盖”的区域,需要进行一次差值分析。于是,DAG的最终节点生成:
Task4: OverlayAnalysis (Erase) using Task1's output as input feature, and Task3's output as erase feature
生成的DAG:
Task1 -> Task3
Task2 -> Task3
Task1 -> Task4
Task3 -> Task4
DAG执行引擎
一旦DAG生成,就可以由一个工作流引擎(如Apache Airflow或Prefect)来自动执行。引擎会根据节点间的依赖关系,并行执行无依赖的任务(如Task1和Task2),串行执行有依赖的任务,并管理整个流程的容错、重试和日志。
通过这个“知识图谱+推理机”的架构,我们的系统不再是简单地执行命令,而是真正地“理解”了任务,并能自主地、逻辑地规划出解决方案。
2.3 支柱三:生成式规划与优化——不止于分析,更在于创造
前两个支柱让GIS具备了强大的“分析”能力,但一个真正的“智能大脑”,还必须具备“创造”能力。它不仅能回答“现状如何?”,更能回答“未来应该怎样?”。这就是生成式规划与优化的用武之地。
核心思想:从“评估者”到“设计师”
传统的GIS是“评估者”,你给它一个方案,它告诉你好坏。而生成式规划,是要让GIS成为“设计师”,你给它一个目标和约束,它为你创造出一组备选方案。
可操作的生成式规划流程
问题形式化:定义“设计空间”
首先,需要将规划问题形式化。这包括:
设计变量:哪些是可以设计的?例如,每个地块的土地利用类型(居住、商业、工业、绿地)、建筑容积率、建筑高度等。
约束条件:哪些是不可违背的?例如,总建筑面积不能超过上限、生态保护红线内不能开发、必须满足一定的绿地率等。
目标函数:哪些是需要优化的?例如,最大化经济效益、最小化通勤时间、最大化生态服务价值等。
生成式模
















暂无评论内容