在写中文论文的时候,使用Endnote会出现中文文章引用作者最后的”等”变成“et al.”此类中英文混搭的问题。目前只学会批量解决文章最后参考文献格式的混搭,文章中的引用部分只能手动更改。
我们文章中引用的参考文献一般有期刊文章,书籍等,目前我们需要对中文期刊创建一类新的引用类型,再对其进行设置,这样就可以不对英文期刊的引用格式进行更改了。
其原理是引用格式设置中有作者清单和编者清单,一般文献的引用都是作者+年份等信息,我们更改中文文献引用格式为编者+年份。
1. 建立新的分组,创建secondary author
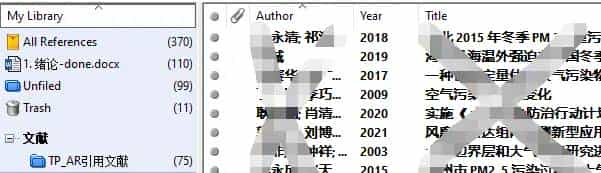
先将所有中文文献创立一个新的group,方便后续统一调整
在此分组中打开【Tool】——【Change/Move/Copy Fields】——【Move/Copy Fields】,并根据下图的选择进行设置
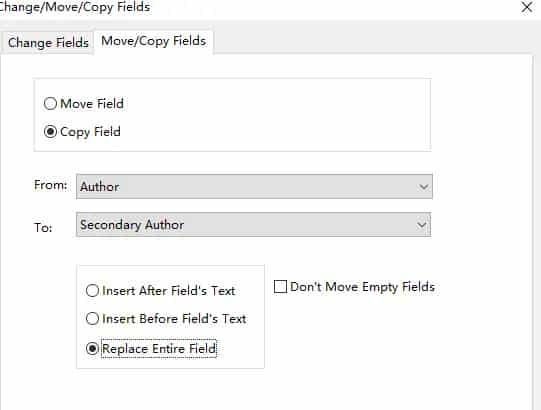
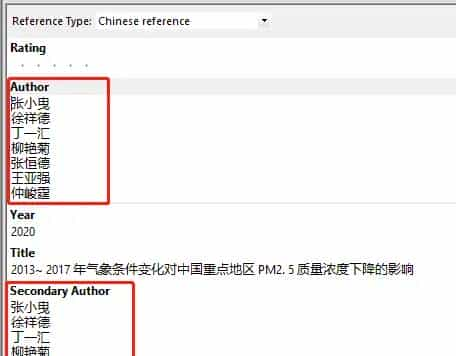
随后再打开一个文件,就会发现出现了新的一栏Second author,具体信息与author一致,这个信息我们会用在editor list的设置里
2. 建立新的Reference type
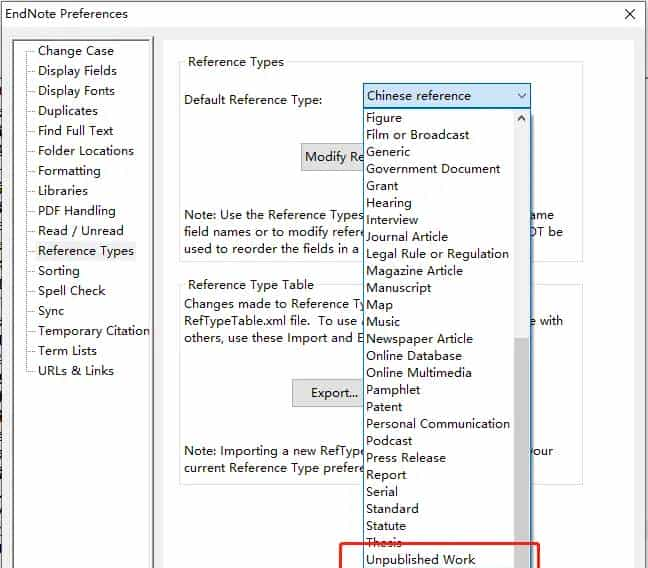
选择【Edit】——【Preference】——【Reference Types】
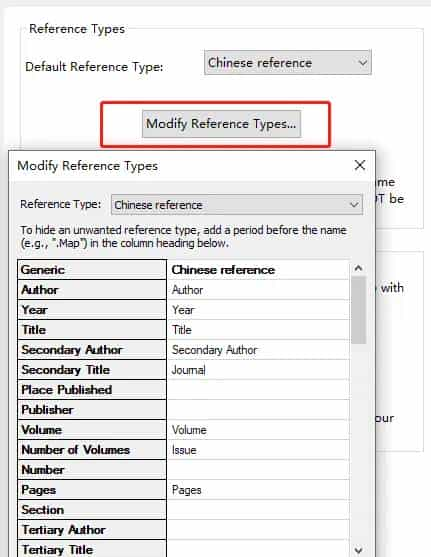
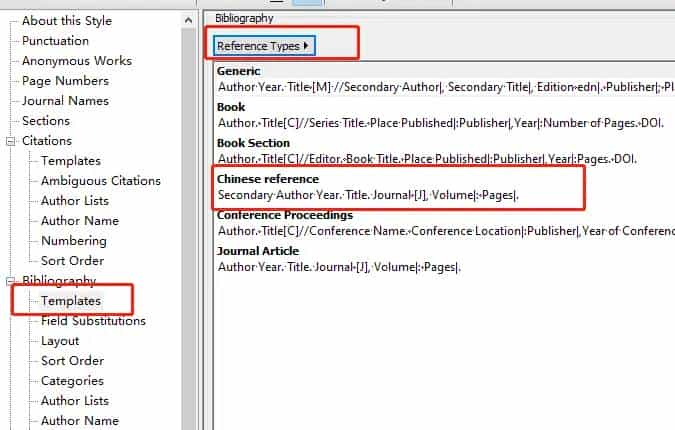
在默认的Reference Type里面有三种未使用的类型,我这里以及创建过了,将Unused 1改为了Chinese Reference,各位可以自行选择,然后按照下图设置对应的引用模块,注意secondary author必定不要忘!
3. 设置中文文献引用格式
选择【Edit】——【Output styles】我这里选的是国标GBT7714
在Reference Type里面勾选上你刚刚新设置的文献类型Chinese Reference,文献引用格式是直接复制了Journal Article,将Author更改为Secondary Author即可,注意中间的空格不要忘记,怕出问题可以从Generic里面复制。
4. 设置中文文献的引用细节
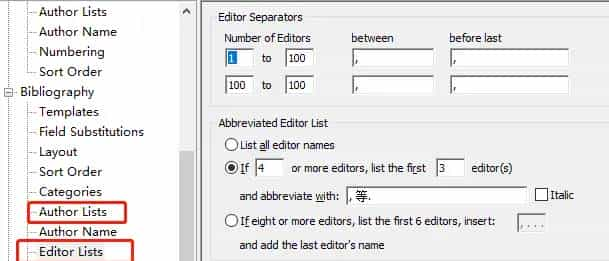
还是在编辑国标GBT7714里
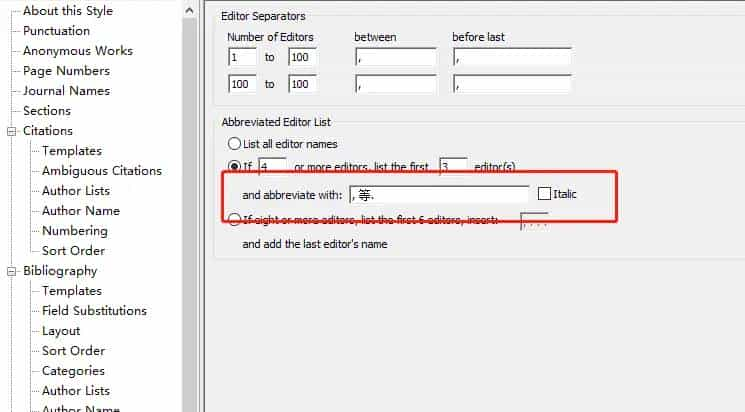
将Editor list里设置大于四个作者后et al.的部分更改为等即可
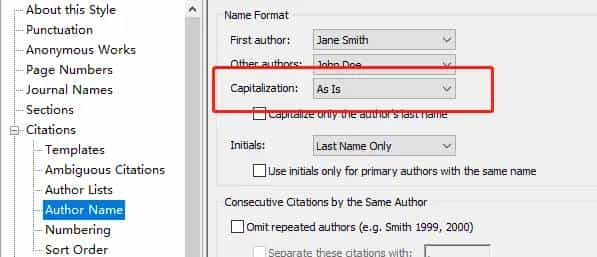
这个自带的国标会出现英文名全部大写的问题,但是一般期刊要求只有首字母大写
把这个Author name的大写设置改成As Is就好啦
5. 更改中文文献的reference type
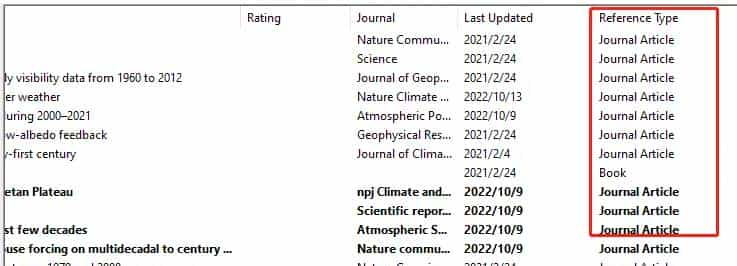
一般参考文献刚导入的reference type就是journal article,为了使上面的更改生效,千万不要忘了更改这一属性
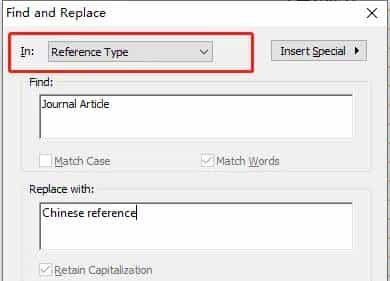
在中文文献分组状态下,选择【Edit】——【Find and replace】
将这一组中的reference type都替换为Chinese reference,如果有的导入进来是Generic,记得替换两遍
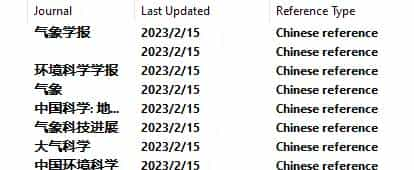
替换完就统一都是Chinese reference啦
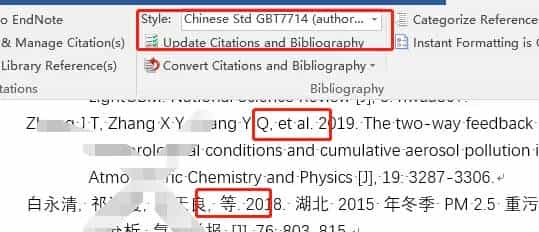
6. word中更新
再回到word里选择你刚刚更改过的格式,再update一下就大功告成啦
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...