
在图像处理中,直方图是分析图像亮度、色彩分布的核心工具,而模糊操作则是降噪、平滑图像的基础手段。这篇教程将结合完整可运行的OpenCV代码,详细拆解1D直方图绘制、2D直方图分析、直方图均衡化以及三种常用模糊算法的原理与实现,从代码逐行解读到实际应用场景。
一、为什么这些操作很重要?
明确每个功能的核心作用:
直方图(1D/2D):将图像像素值的分布可视化,1D直方图聚焦单通道(如BGR)的亮度分布,2D直方图可分析色彩组合(如HSV的色相-饱和度),常用于图像分割、曝光调整等场景。直方图均衡化:通过调整像素分布,增强图像对比度,解决暗部细节不清晰、图像偏暗等问题,是图像增强的基础方法。模糊操作:通过卷积运算降低图像噪声,平滑细节。不同模糊算法的区别在于“保留边缘能力”和“降噪效果”的平衡——普通模糊降噪强但边缘模糊,双边模糊能在降噪的同时保留边缘。
二、代码结构
代码包含6个核心功能函数+1个主函数:
// 头文件与命名空间
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
// 1. 1D三通道直方图绘制
void Histogram_demo(Mat& image);
// 2. 2D(HSV)直方图绘制
void Histogram_2d_demo(Mat& image);
// 3. 直方图均衡化(灰度图)
void histogram_eq_demo(Mat& image);
// 4. 普通均值模糊
void blur_demo(Mat& image);
// 5. 高斯模糊
void gaussian_blur_demo(Mat& image);
// 6. 双边模糊
void bifilter_demo(Mat& image);
// 主函数:读取图像+调用所有功能
int main() { ... }
三、逐函数拆解:原理+代码+细节
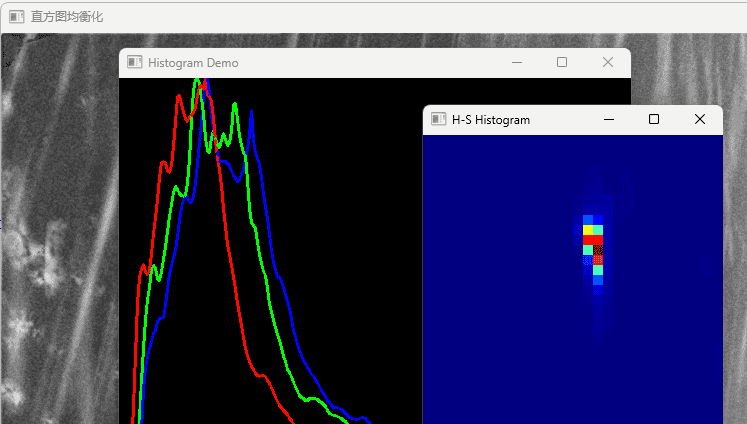
(一)1D直方图:可视化三通道像素分布(Histogram_demo)
核心作用
将BGR图像的蓝、绿、红三个通道,分别统计0~255像素值的出现次数,用三条曲线可视化,直观看到图像的色彩分布(如红色多则红色曲线偏高)。
代码逐行解读
void Histogram_demo(Mat& image) {
// 1. 三通道分离:将BGR图像拆成3个单通道图像
vector<Mat> bgr_plane; // 存储三个单通道的容器
split(image, bgr_plane); // split(输入图像, 输出容器):bgr_plane[0]=B通道,[1]=G通道,[2]=R通道
// 2. 直方图计算参数设置(关键!)
const int channels[] = { 0 }; // 计算单通道直方图,通道索引为0(每个单通道独立计算)
const int bins[] = { 256 }; // 分箱数:0~255共256个像素值,每个值对应一个"箱"
float hranges[] = { 0, 255 }; // 像素值统计范围:只统计0到255(8位图像的全部范围)
const float* ranges[] = { hranges }; // 指向范围数组的指针(calcHist要求参数格式)
// 3. 存储三个通道的直方图结果(Mat类型,1行256列,float型)
Mat b_hist, g_hist, r_hist;
// 4. 计算直方图:calcHist是OpenCV核心函数
// 参数说明:输入图像指针、图像数量、通道索引、掩码(Mat()表示无掩码)、输出直方图、
// 直方图维度(1D)、分箱数、像素范围、是否均匀分布、是否累积
calcHist(&bgr_plane[0], 1, channels, Mat(), b_hist, 1, bins, ranges);
calcHist(&bgr_plane[1], 1, channels, Mat(), g_hist, 1, bins, ranges);
calcHist(&bgr_plane[2], 1, channels, Mat(), r_hist, 1, bins, ranges);
// 5. 准备直方图绘制的空白图像
int hist_w = 512; // 直方图图像宽度(像素)
int hist_h = 400; // 直方图图像高度(像素)
int bin_w = cvRound((double)hist_w / bins[0]); // 每个"箱"的宽度(512/256=2像素)
// 创建黑色背景的彩色图像:尺寸(高度,宽度),类型CV_8UC3(8位3通道),颜色Scalar(0,0,0)(黑色)
Mat histImage(hist_h, hist_w, CV_8UC3, Scalar(0, 0, 0));
// 6. 归一化直方图(关键步骤!否则曲线可能超出图像范围)
// 格式:normalize(输入, 输出, 最小值, 最大值, 归一化类型, 数据类型, 掩码)
// 作用:将直方图的数值缩放到0~hist_h(直方图图像高度),确保曲线能完整显示在图像中
normalize(b_hist, b_hist, 0, histImage.rows, NORM_MINMAX, -1, Mat());
normalize(g_hist, g_hist, 0, histImage.rows, NORM_MINMAX, -1, Mat());
normalize(r_hist, r_hist, 0, histImage.rows, NORM_MINMAX, -1, Mat());
// 7. 绘制直方图曲线:用line函数连接每个"箱"的顶点
for (int i = 1; i < bins[0]; i++) { // 从1开始(避免i-1=0越界)
// 蓝色通道(B):线条颜色Scalar(255,0,0)(BGR格式),线宽2
line(histImage,
Point(bin_w*(i-1), hist_h - cvRound(b_hist.at<float>(i-1))), // 起点:(前一个箱的x, 高度-前一个箱的数值)
Point(bin_w*i, hist_h - cvRound(b_hist.at<float>(i))), // 终点:(当前箱的x, 高度-当前箱的数值)
Scalar(255, 0, 0), 2, 8, 0); // 线宽2,线型8(连续线),偏移0
// 绿色通道(G):颜色Scalar(0,255,0)
line(histImage,
Point(bin_w*(i-1), hist_h - cvRound(g_hist.at<float>(i-1))),
Point(bin_w*i, hist_h - cvRound(g_hist.at<float>(i))),
Scalar(0, 255, 0), 2, 8, 0);
// 红色通道(R):颜色Scalar(0,0,255)
line(histImage,
Point(bin_w*(i-1), hist_h - cvRound(r_hist.at<float>(i-1))),
Point(bin_w*i, hist_h - cvRound(r_hist.at<float>(i))),
Scalar(0, 0, 255), 2, 8, 0);
}
// 8. 显示直方图
namedWindow("Histogram Demo", WINDOW_AUTOSIZE); // 创建窗口
imshow("Histogram Demo", histImage); // 显示图像
}
关键注意点
分箱数
bins=256
65536
NORM_MINMAX
hist_h - 数值
(二)2D直方图:分析HSV色彩组合(Histogram_2d_demo)
核心作用
1D直方图只看单个通道,2D直方图可分析两个通道的组合分布(如HSV颜色空间的“色相H-饱和度S”),能更精准区分色彩(比如红色的不同饱和度分布),常用于色彩分割。
代码逐行解读
void Histogram_2d_demo(Mat& image) {
// 1. 转换颜色空间:BGR→HSV(HSV更适合色彩分析)
Mat hsv, hs_hist;
cvtColor(image, hsv, COLOR_BGR2HSV); // cvtColor(输入, 输出, 颜色空间转换类型)
// 2. 2D直方图参数设置(HSV通道特性)
// H(色相)取值范围:0~180(OpenCV中8位HSV的H通道被压缩为0~180)
// S(饱和度)取值范围:0~255
int hbins = 30; // H通道分箱数(30个区间,每个区间6度)
int sbins = 32; // S通道分箱数(32个区间)
int hist_bins[] = { hbins, sbins }; // 2D直方图的分箱数(两个维度)
// 两个通道的数值范围
float h_range[] = { 0, 180 };
float s_range[] = { 0, 256 }; // 注意S的上限是256(左闭右开区间)
const float* hs_ranges[] = { h_range, s_range }; // 两个通道的范围指针
int hs_channels[] = { 0, 1 }; // 要分析的两个通道:H(索引0)、S(索引1)
// 3. 计算2D直方图
// 参数变化:维度改为2,分箱数和范围都是数组(对应两个通道)
calcHist(&hsv, 1, hs_channels, Mat(), hs_hist, 2, hist_bins, hs_ranges, true, false);
// 4. 归一化:找到直方图最大值,将所有数值缩放到0~255(便于显示)
double maxVal = 0;
minMaxLoc(hs_hist, 0, &maxVal, 0, 0); // 找到直方图的最大值maxVal
int scale = 10; // 每个"箱"的显示缩放比例(让直方图图像更大)
// 5. 创建2D直方图显示图像(尺寸=分箱数×缩放比例)
Mat hist2d_image = Mat::zeros(sbins * scale, hbins * scale, CV_8UC3);
// 6. 绘制2D直方图:每个"箱"用矩形表示,亮度代表数值大小
for (int h = 0; h < hbins; h++) { // 遍历H通道的每个箱
for (int s = 0; s < sbins; s++) { // 遍历S通道的每个箱
float binVal = hs_hist.at<float>(h, s); // 获取当前箱的数值
int intensity = cvRound(binVal * 255 / maxVal); // 缩放到0~255(亮度值)
// 绘制矩形:每个箱对应一个矩形,颜色亮度由intensity决定
rectangle(hist2d_image,
Point(h * scale, s * scale), // 左上角坐标
Point((h + 1) * scale - 1, (s + 1) * scale - 1), // 右下角坐标(-1避免重叠)
Scalar::all(intensity), // 颜色:亮度intensity,RGB相同(灰度)
-1); // 填充矩形(-1表示填充,正数表示线宽)
}
}
// 7. 彩色映射:将灰度直方图转为彩色(更直观)
applyColorMap(hist2d_image, hist2d_image, COLORMAP_JET); // JET色系(蓝→绿→红)
// 8. 显示并保存结果
imshow("H-S Histogram", hist2d_image);
imwrite("C:/code/workplace/data/image/his2d.jpg", hist2d_image); // 替换为你的保存路径
}
关键注意点
HSV通道范围:OpenCV中8位HSV的H通道是0180(不是0360),S和V是0~255,设置范围时不能错。彩色映射
COLORMAP_JET
COLORMAP_HSV
COLORMAP_PARULA
(三)直方图均衡化:增强图像对比度(histogram_eq_demo)
核心作用
通过重新分配像素值,让图像的亮度分布更均匀,解决暗部细节丢失、图像偏暗的问题(比如逆光拍摄的照片)。注意:均衡化默认只支持灰度图,彩色图需先转灰度或分通道处理。
代码逐行解读
void histogram_eq_demo(Mat& image) {
// 1. 转为灰度图(均衡化只支持单通道图像)
Mat gray;
cvtColor(image, gray, COLOR_BGR2GRAY); // BGR→灰度
// 2. 直方图均衡化:核心函数equalizeHist
Mat dst;
equalizeHist(gray, dst); // equalizeHist(输入灰度图, 输出均衡化图)
// 3. 显示结果(可对比原图灰度图看效果)
imshow("直方图均衡化", dst);
}
扩展:彩色图均衡化
若想对彩色图均衡化,需分通道处理(避免色彩失真):
// 彩色图均衡化(扩展代码)
void color_eq_demo(Mat& image) {
vector<Mat> bgr_plane;
split(image, bgr_plane);
// 对每个通道分别均衡化
equalizeHist(bgr_plane[0], bgr_plane[0]);
equalizeHist(bgr_plane[1], bgr_plane[1]);
equalizeHist(bgr_plane[2], bgr_plane[2]);
// 合并通道
Mat dst;
merge(bgr_plane, dst);
imshow("彩色均衡化", dst);
}
(四)模糊操作:三种常用算法对比
模糊的核心是“卷积运算”——用一个核(比如3×3、5×5的矩阵)遍历图像,每个像素值替换为核内像素的加权平均。不同算法的核不同,效果也不同。
1. 普通均值模糊(blur_demo):快速降噪
void blur_demo(Mat& image) {
Mat dst;
// blur(输入图像, 输出图像, 核尺寸, 锚点)
// 核尺寸:(13,13)表示13×13的核(尺寸越大,模糊越强,必须是奇数)
// 锚点:Point(-1,-1)表示默认中心位置
blur(image, dst, Size(13, 13), Point(-1, -1));
imshow("图像模糊", dst);
}
特点:计算快,降噪效果明显,但会模糊图像边缘,适合对边缘要求不高的场景。
2. 高斯模糊(gaussian_blur_demo):高斯分布加权模糊
void gaussian_blur_demo(Mat& image) {
Mat dst;
// GaussianBlur(输入, 输出, 核尺寸, 标准差sigmaX, sigmaY=0)
// 核尺寸:(5,5)(必须是奇数)
// sigmaX:X方向标准差(越大,模糊越强),sigmaY默认0表示和sigmaX相同
GaussianBlur(image, dst, Size(5, 5), 15);
imshow("高斯模糊", dst);
}
特点:核内像素按高斯分布加权(中心权重高,边缘权重低),模糊效果更自然,比均值模糊保留更多细节,是最常用的模糊算法。
3. 双边模糊(bifilter_demo):保边降噪
void bifilter_demo(Mat& image) {
Mat dst;
// bilateralFilter(输入, 输出, 邻域直径, 颜色标准差, 空间标准差)
// 邻域直径:0表示自动计算(推荐用0,避免手动调参)
// 颜色标准差(sigmaColor):越大,允许更多不同颜色的像素参与模糊(降噪能力越强)
// 空间标准差(sigmaSpace):越大,邻域内影响当前像素的范围越广(模糊范围越大)
bilateralFilter(image, dst, 0, 100, 10);
imshow("双边模糊", dst);
}
特点:保边降噪是核心优势——在模糊噪声的同时,能保留图像的边缘细节(比如人脸模糊后,五官轮廓依然清晰)。适用场景:人像美化、文物修复、需要保留边缘的降噪场景,但计算速度比前两种模糊慢。
三种模糊算法对比表
| 算法类型 | 核心优势 | 缺点 | 适用场景 |
|---|---|---|---|
| 均值模糊 | 计算最快,降噪效果明显 | 模糊边缘,细节丢失多 | 快速预处理、对边缘无要求的场景 |
| 高斯模糊 | 模糊效果自然,细节保留较好 | 边缘有轻微模糊 | 日常降噪、图像预处理(如检测前降噪) |
| 双边模糊 | 保边降噪,边缘清晰 | 计算最慢,参数敏感 | 人像美化、精准降噪、边缘保留场景 |
四、主函数:统一调度所有功能
主函数的作用是读取图像、调用所有功能函数,并处理图像加载失败的异常,逻辑简单但必不可少:
int main() {
// 1. 读取图像(替换为你的图像路径,支持相对路径或绝对路径)
string PicPath = "test.jpg"; // 示例:"./test.jpg"(相对路径)或 "C:/images/test.png"(绝对路径)
Mat image = imread(PicPath);
// 2. 检查图像是否加载成功
if (image.empty()) {
cerr << "无法加载图像!请检查路径是否正确。" << endl;
return -1; // 加载失败,退出程序
}
// 3. 显示原始图像(方便对比处理效果)
namedWindow("Original Image", WINDOW_AUTOSIZE);
imshow("Original Image", image);
// 4. 调用所有功能函数
Histogram_demo(image); // 1D三通道直方图
Histogram_2d_demo(image); // 2D H-S直方图
histogram_eq_demo(image); // 直方图均衡化
blur_demo(image); // 均值模糊
gaussian_blur_demo(image); // 高斯模糊
bifilter_demo(image); // 双边模糊
// 5. 等待用户按键,关闭所有窗口
waitKey(0); // 0表示无限等待,直到按下任意键
destroyAllWindows(); // 释放窗口资源
return 0;
}
五、常见问题解决
图像加载失败:检查路径是否包含中文、文件是否存在、格式是否支持(OpenCV支持JPG、PNG、BMP等常见格式)。直方图看不到曲线:忘记归一化
normalize
sigmaX
using namespace cv;
六、实际应用场景总结
直方图(1D/2D):图像质量分析(如曝光是否正常)、色彩分割(如提取特定色相的物体)、图像检索(通过直方图匹配相似图像)。直方图均衡化:监控摄像头图像增强、老照片修复、逆光照片提亮、医学图像(如X光片)细节增强。模糊操作:
均值模糊:快速降噪、图像压缩前预处理。高斯模糊:磨皮效果、边缘检测前降噪(如Canny检测前用高斯模糊去噪)。双边模糊:人像美化、文物照片修复、保留边缘的降噪场景。















暂无评论内容