

智能家居已从概念走向普及,据IDC数据,2024年全球智能家居设备出货量预计突破12亿台,年增长率达14.9%。在这个蓬勃发展的领域,STM32微控制器凭借其高性能、低功耗和丰富的外设接口,成为连接物理世界与数字智能的理想选择。本文将以”智能家居环境监测与控制系统”为案例,全面展示如何使用STM32F103C8T6(”蓝桥杯”竞赛常用型号)实现多外设协同工作,涵盖温湿度传感、光照检测、OLED显示、继电器控制、声光报警及用户交互等核心功能。通过这个综合性项目,你将掌握STM32外设控制的通用方法和最佳实践,为更复杂的嵌入式系统开发奠定基础。
系统总体设计:构建智能环境监测控制中枢
智能家居环境监测与控制系统的核心价值在于创建一个能够自主感知、智能决策、自动调节的室内环境管理系统。想象这样一个场景:当室内温度超过28℃时,系统自动开启风扇降温;当湿度低于30%时,提醒用户开启加湿器;当光照强度低于设定阈值时,自动点亮室内灯光;所有环境参数实时显示在OLED屏幕上,并可通过按键手动切换显示界面或修改阈值参数。这不仅提升了居住舒适度,还能实现节能减排,据统计,智能环境控制系统平均可降低15-20%的能源消耗。
系统架构概览
本系统采用分层架构设计,自下而上分为感知层、控制层、决策层和交互层,各层职责明确且协同工作:
graph TD A[感知层] -->|环境数据| B[控制层] B -->|处理后数据| C[决策层] C -->|控制指令| D[执行层] E[交互层] <--> B E <--> C subgraph 感知层 A1[温湿度传感器 DHT11] A2[光照传感器 BH1750] A3[人体红外传感器] end subgraph 控制层 B1[STM32F103 核心控制器] B2[数据采集模块] B3[数据处理模块] end subgraph 决策层 C1[环境控制逻辑] C2[阈值判断模块] C3[报警逻辑] end subgraph 执行层 D1[继电器模块-灯光控制] D2[继电器模块-风扇控制] D3[蜂鸣器-报警] end subgraph 交互层 E1[OLED显示屏] E2[按键输入] E3[蓝牙模块 HC-05] end
这种分层设计带来三大优势:首先,各层功能解耦,便于独立开发和测试;其次,系统模块化程度高,易于维护和扩展;最后,清晰的层次结构降低了代码复杂度,提高了系统可靠性。
核心功能与技术指标
本系统实现五大核心功能,每项功能都有明确的技术指标:
环境参数监测:
温度测量范围:0-50℃,精度±2℃湿度测量范围:20-90%RH,精度±5%RH光照强度测量范围:0-65535 lx,精度±1 lx数据更新周期:1秒
智能环境控制:
灯光自动控制响应时间<1秒风扇自动控制响应时间<1秒支持手动/自动控制模式切换
信息显示功能:
128×64分辨率OLED显示屏多页面显示切换(环境参数页、系统状态页、阈值设置页)界面刷新频率:0.5Hz
异常报警功能:
超阈值声光报警可配置报警灵敏度支持手动消音
用户交互功能:
3个独立功能按键蓝牙无线控制(可选)参数阈值可现场设置
系统工作流程
系统工作流程遵循”感知-决策-执行”的闭环控制模型,具体流程如下:
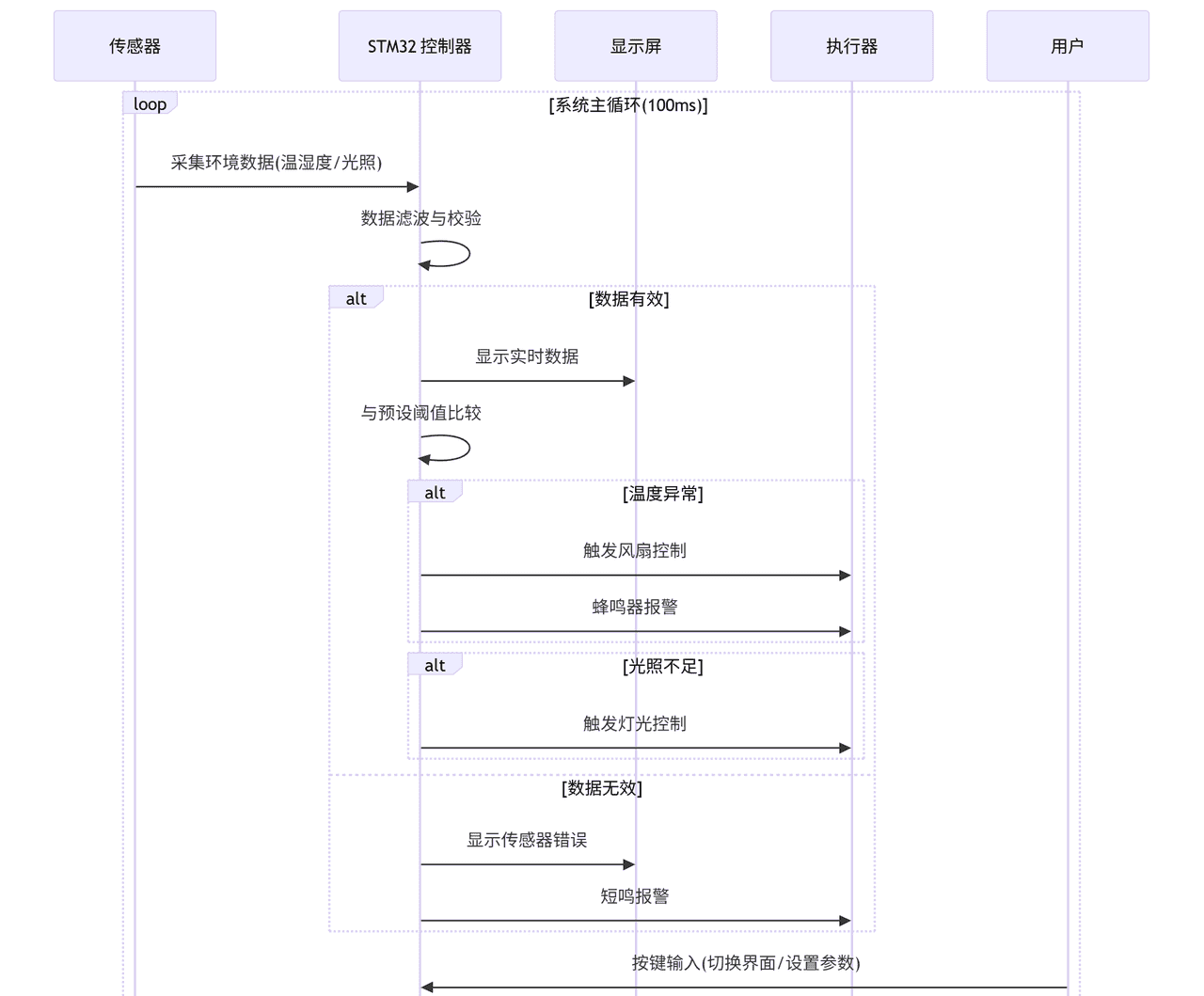
sequenceDiagram participant S as 传感器 participant C as STM32控制器 participant D as 显示屏 participant A as 执行器 participant U as 用户 loop 系统主循环(100ms) S->>C: 采集环境数据(温湿度/光照) C->>C: 数据滤波与校验 alt 数据有效 C->>D: 显示实时数据 C->>C: 与预设阈值比较 alt 温度异常 C->>A: 触发风扇控制 C->>A: 蜂鸣器报警 end alt 光照不足 C->>A: 触发灯光控制 end else 数据无效 C->>D: 显示传感器错误 C->>A: 短鸣报警 end U->>C: 按键输入(切换界面/设置参数) C->>D: 更新显示界面 end
系统采用100ms的主循环周期,确保对环境变化的快速响应,同时避免过度频繁的数据采集导致系统资源浪费。在每个循环中,系统完成一次完整的数据采集、处理、决策和执行流程,并响应可能的用户输入。
硬件设计详解:构建可靠的物理基础
硬件是嵌入式系统的物理基础,一个精心设计的硬件电路能够显著降低软件开发难度并提高系统可靠性。本系统硬件设计遵循”模块化、可扩展、低功耗”三大原则,选用业界成熟的传感器和执行器模块,确保系统稳定运行的同时降低开发门槛。
STM32核心控制器选型
本系统选用STM32F103C8T6作为核心控制器,这款芯片属于STM32F1系列的”超值型”产品,具有以下特点:
核心参数:ARM Cortex-M3内核,72MHz主频,64KB Flash,20KB SRAM外设资源:3个16位定时器,2个I2C接口,3个SPI接口,5个USART接口,37个GPIO引脚电源特性:2.0-3.6V工作电压,多种低功耗模式封装形式:LQFP48封装,48引脚价格优势:市场价格约15-20元人民币,性价比极高
这款控制器的资源完全满足本项目需求:I2C接口用于连接BH1750光照传感器和OLED显示屏;GPIO用于连接DHT11温湿度传感器、按键、蜂鸣器和继电器;USART接口可用于蓝牙模块通信。其72MHz的主频足以处理多任务并发执行,而20KB的SRAM和64KB的Flash为后续功能扩展预留了空间。
硬件模块详细设计
电源管理模块
稳定的电源是系统可靠运行的基础。本系统采用5V直流供电,通过AMS1117-3.3V稳压芯片为STM32和各模块提供3.3V电源。设计要点包括:
在STM32的VCC和GND之间并联100nF陶瓷电容和10uF电解电容,滤除电源噪声为继电器模块单独设计供电电路,避免继电器吸合时产生的电压波动影响主控制器各传感器模块电源引脚附近放置0.1uF去耦电容,提高抗干扰能力
核心外设电路设计
1. DHT11温湿度传感器接口
DHT11是一款低成本、单总线的温湿度传感器,其电路连接非常简单:
STM32 PA0 <---> DHT11 DATA引脚 3.3V <---> DHT11 VCC引脚 GND <---> DHT11 GND引脚 (在DATA引脚与3.3V之间连接一个4.7K上拉电阻)
关键设计考虑:DHT11的DATA引脚需要外部上拉电阻,这是因为单总线通信时,总线空闲状态应为高电平。上拉电阻通常选择4.7KΩ,既保证了信号完整性,又不会过度增加功耗。
2. BH1750光照传感器接口
BH1750是一款I2C接口的数字光照传感器,精度高,支持多种测量模式:
STM32 PB10 <---> BH1750 SCL引脚 (I2C时钟线) STM32 PB11 <---> BH1750 SDA引脚 (I2C数据线) 3.3V <---> BH1750 VCC引脚 GND <---> BH1750 GND引脚 (在SCL和SDA引脚与3.3V之间各连接一个4.7K上拉电阻)
关键设计考虑:I2C总线需要上拉电阻才能正常工作,通常选择4.7KΩ。BH1750支持两种I2C从地址,通过ADDR引脚电平控制,悬空时默认地址为0x46。
3. OLED显示屏接口 (SSD1306)
选用0.96英寸OLED显示屏,分辨率128×64,I2C接口:
STM32 PB10 <---> OLED SCL引脚 (与BH1750共用I2C总线) STM32 PB11 <---> OLED SDA引脚 (与BH1750共用I2C总线) 3.3V <---> OLED VCC引脚 GND <---> OLED GND引脚 OLED RST <---> STM32 PA1引脚 (复位引脚)
关键设计考虑:多个I2C设备可以共用SCL和SDA总线,通过不同的设备地址区分。SSD1306的默认I2C地址为0x78(取决于ADDR引脚连接方式)。复位引脚(RST)用于初始化显示屏,低电平有效。
4. 继电器模块接口
继电器模块用于控制高功率设备(如灯光、风扇),本设计包含两路继电器:
STM32 PA2 <---> 继电器1控制引脚 (灯光控制) STM32 PA3 <---> 继电器2控制引脚 (风扇控制) 继电器模块 VCC <---> 5V电源 (继电器线圈需要较大电流) 继电器模块 GND <---> GND 继电器公共端(COM) <---> 220V火线输入端 继电器常开端(NO) <---> 负载(灯/风扇)
关键设计考虑:继电器模块通常需要5V供电才能保证可靠吸合。STM32的GPIO引脚输出3.3V,足以驱动模块上的光电耦合器。继电器控制逻辑为高电平吸合,低电平释放(可通过模块上的跳线选择)。
5. 蜂鸣器接口
选用有源蜂鸣器,简化驱动电路:
STM32 PA4 <---> 蜂鸣器控制引脚 蜂鸣器 VCC <---> 3.3V 蜂鸣器 GND <---> 三极管集电极 三极管基极 <---> 1K限流电阻 <---> PA4 三极管发射极 <---> GND
关键设计考虑:虽然STM32的GPIO可以直接驱动小型蜂鸣器,但使用三极管放大电流可以提高蜂鸣器音量,并避免GPIO引脚过载。选用S8050 NPN三极管即可满足需求。
6. 按键接口
设计3个功能按键:菜单键、加键、减键:
STM32 PA5 <---> 菜单键 (K1) STM32 PA6 <---> 加键 (K2) STM32 PA7 <---> 减键 (K3) 各按键一端接GPIO,另一端接地 每个按键并联一个100nF去抖电容 GPIO引脚通过内部上拉电阻保持高电平
关键设计考虑:按键采用”下拉”设计(按键另一端接地),STM32内部上拉电阻使GPIO默认保持高电平,按键按下时变为低电平。并联电容用于硬件去抖,可显著提高按键检测可靠性。
系统整体电路布局建议
合理的电路布局对系统稳定性至关重要,特别是在处理模拟信号和数字信号混合的情况下:
分区布局:将电路板分为模拟区(传感器)和数字区(控制器、继电器),减少数字电路对模拟电路的干扰接地策略:采用单点接地,数字地和模拟地在电源处汇合电源路径:确保大电流路径(如继电器供电)短而粗,避免影响小信号电路去耦电容:每个集成电路的电源引脚附近放置0.1uF去耦电容,滤除高频噪声信号线:敏感信号线(如I2C、传感器信号线)尽量短,避免与功率线平行布线
软件设计详解:构建模块化控制系统
嵌入式系统的软件设计质量直接决定了产品的性能、可靠性和可维护性。本项目采用”模块化、分层设计”思想,将复杂系统分解为多个功能明确、接口清晰的模块,降低开发难度并提高代码复用性。系统软件基于STM32CubeIDE开发,使用HAL库进行外设操作,兼顾开发效率和代码可读性。
开发环境与工具链
开发环境:STM32CubeIDE 1.13.0(ST官方集成开发环境,基于Eclipse) 固件库:STM32CubeF1 V1.8.5(包含HAL库和底层驱动) 调试工具:ST-Link V2(SWD模式,支持在线调试和程序下载) 辅助工具:STM32CubeMX(图形化配置工具,用于生成初始化代码)
STM32CubeIDE的优势在于将STM32CubeMX集成到开发环境中,支持图形化配置外设和生成初始化代码,大大减少了底层配置工作。HAL库(硬件抽象层)提供了统一的API接口,使代码具有更好的可移植性。
软件架构分层
系统软件采用清晰的分层架构,每层专注于特定功能,通过定义良好的接口与其他层交互:
layerDiagram layer 应用层 : 用户界面 / 控制逻辑 layer 服务层 : 传感器服务 / 执行器服务 / 显示服务 layer 驱动层 : GPIO / I2C / UART / TIMER 驱动 layer 硬件抽象层 : HAL库 layer 硬件层 : STM32及外设 应用层 --> 服务层 : 调用服务接口 服务层 --> 驱动层 : 使用驱动功能 驱动层 --> 硬件抽象层 : HAL库函数调用 硬件抽象层 --> 硬件层 : 直接操作硬件
各层功能说明:
硬件层:物理硬件,包括STM32微控制器和所有外设模块硬件抽象层:ST提供的HAL库,封装了底层硬件操作驱动层:基于HAL库实现的外设驱动,如I2C驱动、GPIO驱动等服务层:实现特定功能的服务模块,如传感器数据采集服务、显示服务等应用层:实现业务逻辑,如环境控制算法、用户界面交互等
核心模块详细设计
1. 系统初始化模块
系统上电后首先执行初始化流程,确保所有硬件和软件模块处于正确状态:
void System_Init(void) { HAL_Init(); // 初始化HAL库 SystemClock_Config(); // 配置系统时钟(72MHz) MX_GPIO_Init(); // 初始化GPIO MX_I2C2_Init(); // 初始化I2C2(用于传感器和OLED) MX_TIM2_Init(); // 初始化定时器2(用于延时和PWM) OLED_Init(); // 初始化OLED显示屏 Buzzer_Init(); // 初始化蜂鸣器 Relay_Init(); // 初始化继电器 Key_Init(); // 初始化按键 DHT11_Init(); // 初始化DHT11传感器 BH1750_Init(); // 初始化BH1750传感器 // 系统参数初始化 System_Params_Init(); // 开机提示 OLED_Clear(); OLED_ShowString(0, 0, "System Initializing"); OLED_ShowString(0, 2, "STM32 Smart Home"); OLED_ShowString(0, 6, "V1.0.0"); HAL_Delay(2000); // 自检蜂鸣器 Buzzer_Beep(100); }
时钟配置是初始化的关键环节,通过STM32CubeMX配置系统时钟树如下:
外部高速时钟(HSE):8MHz(来自外部晶振)PLL倍频系数:9倍,得到72MHz系统时钟HCLK(AHB时钟):72MHzPCLK1(APB1时钟):36MHzPCLK2(APB2时钟):72MHz
2. 传感器数据采集模块
传感器数据采集是系统的”感知”部分,负责获取环境参数:
// 传感器数据结构体 typedef struct { float temperature; // 温度(℃) float humidity; // 湿度(%RH) uint16_t light; // 光照强度(lx) uint8_t sensor_flag;// 传感器状态标志位 } Sensor_Data_TypeDef; // 全局传感器数据变量 Sensor_Data_TypeDef sensor_data = {0}; // 数据采集任务 void Sensor_Collect_Task(void) { static uint8_t dht11_cnt = 0; static uint8_t bh1750_cnt = 0; // DHT11采集(每2秒采集一次) if (dht11_cnt >= 20) { // 系统主循环100ms一次,20*100ms=2s dht11_cnt = 0; if (DHT11_Read_Data(&sensor_data.temperature, &sensor_data.humidity) != HAL_OK) { sensor_data.sensor_flag |= 0x01; // DHT11错误标志 } else { sensor_data.sensor_flag &= ~0x01; // 清除DHT11错误标志 } } else { dht11_cnt++; } // BH1750采集(每1秒采集一次) if (bh1750_cnt >= 10) { // 10*100ms=1s bh1750_cnt = 0; if (BH1750_ReadLight(&sensor_data.light) != HAL_OK) { sensor_data.sensor_flag |= 0x02; // BH1750错误标志 } else { sensor_data.sensor_flag &= ~0x02; // 清除BH1750错误标志 } } else { bh1750_cnt++; } // 数据滤波处理 Sensor_Data_Filter(); } // 数据滤波函数(滑动平均滤波) void Sensor_Data_Filter(void) { static float temp_buf[5] = {0}; static float humi_buf[5] = {0}; static uint16_t light_buf[5] = {0}; static uint8_t index = 0; float temp_sum = 0; float humi_sum = 0; uint32_t light_sum = 0; uint8_t i; // 将新数据加入缓冲区 temp_buf[index] = sensor_data.temperature; humi_buf[index] = sensor_data.humidity; light_buf[index] = sensor_data.light; // 计算平均值 for (i = 0; i < 5; i++) { temp_sum += temp_buf[i]; humi_sum += humi_buf[i]; light_sum += light_buf[i]; } // 更新滤波后的值 sensor_data.temperature = temp_sum / 5; sensor_data.humidity = humi_sum / 5; sensor_data.light = light_sum / 5; // 更新缓冲区索引 index = (index + 1) % 5; }
滤波算法对提高数据可靠性至关重要。这里采用滑动平均滤波,对连续5次采样值求平均,有效抑制随机干扰和传感器噪声。不同传感器可以设置不同的滤波参数,如温湿度变化较慢,可增加滤波窗口大小;光照变化较快,可减小窗口大小。
3. OLED显示模块
OLED显示模块负责向用户展示系统状态和环境数据,设计多页面显示机制:
// 显示页面枚举 typedef enum { PAGE_MAIN = 0, // 主页面-显示环境参数 PAGE_SETTINGS, // 设置页面-阈值设置 PAGE_INFO // 信息页面-系统信息 } Display_Page_TypeDef; // 当前显示页面 Display_Page_TypeDef current_page = PAGE_MAIN; // 显示任务 void Display_Task(void) { switch (current_page) { case PAGE_MAIN: Display_Main_Page(); break; case PAGE_SETTINGS: Display_Settings_Page(); break; case PAGE_INFO: Display_Info_Page(); break; default: current_page = PAGE_MAIN; break; } } // 主页面显示 void Display_Main_Page(void) { static uint32_t last_update_time = 0; // 每500ms更新一次显示,避免频繁刷新 if (HAL_GetTick() - last_update_time < 500) { return; } last_update_time = HAL_GetTick(); OLED_Clear(); // 显示标题 OLED_ShowString(0, 0, "Env Monitor"); OLED_DrawLine(0, 12, 127, 12); // 绘制分隔线 // 显示温度 OLED_ShowString(0, 2, "Temp: "); OLED_ShowNum(48, 2, (int)sensor_data.temperature, 2, 16); OLED_ShowString(64, 2, "."); OLED_ShowNum(72, 2, (int)(sensor_data.temperature * 10) % 10, 1, 16); OLED_ShowString(80, 2, " C"); // 显示湿度 OLED_ShowString(0, 4, "Humi: "); OLED_ShowNum(48, 4, (int)sensor_data.humidity, 2, 16); OLED_ShowString(64, 4, "."); OLED_ShowNum(72, 4, (int)(sensor_data.humidity * 10) % 10, 1, 16); OLED_ShowString(80, 4, " %"); // 显示光照 OLED_ShowString(0, 6, "Light:"); OLED_ShowNum(48, 6, sensor_data.light, 4, 16); OLED_ShowString(80, 6, " lx"); // 显示继电器状态 if (relay_state & 0x01) { OLED_ShowString(104, 2, "L:ON"); } else { OLED_ShowString(104, 2, "L:OFF"); } if (relay_state & 0x02) { OLED_ShowString(104, 4, "F:ON"); } else { OLED_ShowString(104, 4, "F:OFF"); } }
多页面显示设计提高了信息展示量,用户可通过按键切换不同页面。主页面显示核心环境参数,设置页面允许用户调整控制阈值,信息页面展示系统状态和版本信息。为避免OLED频繁刷新导致的视觉闪烁,设计了500ms的显示更新间隔。
4. 环境控制逻辑模块
环境控制是系统的核心功能,根据传感器数据和预设阈值自动控制执行器:
// 系统参数结构体 typedef struct { float temp_high_threshold; // 温度上限阈值 float temp_low_threshold; // 温度下限阈值 float humi_high_threshold; // 湿度上限阈值 float humi_low_threshold; // 湿度下限阈值 uint16_t light_threshold; // 光照阈值 uint8_t auto_mode; // 自动模式使能标志 } System_Params_TypeDef; // 系统参数 System_Params_TypeDef sys_params = { .temp_high_threshold = 28.0f, // 默认温度上限28℃ .temp_low_threshold = 20.0f, // 默认温度下限20℃ .humi_high_threshold = 70.0f, // 默认湿度上限70% .humi_low_threshold = 30.0f, // 默认湿度下限30% .light_threshold = 500, // 默认光照阈值500lx .auto_mode = 1 // 默认启用自动模式 }; // 控制任务 void Control_Task(void) { uint8_t new_relay_state = relay_state; // 只有在自动模式下才执行自动控制逻辑 if (sys_params.auto_mode) { // 光照控制逻辑 if (sensor_data.light < sys_params.light_threshold) { new_relay_state |= 0x01; // 光照不足,开灯 } else { new_relay_state &= ~0x01; // 光照充足,关灯 } // 温度控制逻辑 if (sensor_data.temperature > sys_params.temp_high_threshold) { new_relay_state |= 0x02; // 温度过高,开风扇 } else if (sensor_data.temperature < sys_params.temp_low_threshold) { new_relay_state &= ~0x02; // 温度过低,关风扇 } } // 检测继电器状态变化,只在状态改变时才操作 if (new_relay_state != relay_state) { relay_state = new_relay_state; // 更新继电器输出 if (relay_state & 0x01) { RELAY1_ON(); // 开灯 } else { RELAY1_OFF(); // 关灯 } if (relay_state & 0x02) { RELAY2_ON(); // 开风扇 } else { RELAY2_OFF(); // 关风扇 } } // 报警逻辑 Alarm_Check(); } // 报警检查 void Alarm_Check(void) { static uint8_t alarm_flag = 0; // 温度过高报警 if (sensor_data.temperature > sys_params.temp_high_threshold + 3) { alarm_flag |= 0x01; } // 湿度异常报警 if (sensor_data.humidity > sys_params.humi_high_threshold + 10 || sensor_data.humidity < sys_params.humi_low_threshold - 10) { alarm_flag |= 0x02; } // 传感器故障报警 if (sensor_data.sensor_flag) { alarm_flag |= 0x04; } // 执行报警 if (alarm_flag) { Buzzer_Beep(500); // 蜂鸣器报警 alarm_flag = 0; // 单次报警,避免持续鸣响 } }
控制逻辑设计要点:
采用状态变量记录继电器期望状态,而非直接操作硬件,提高系统稳定性实现迟滞控制,避免在阈值附近频繁切换报警逻辑设计为单次触发,避免持续鸣响造成干扰控制逻辑仅在自动模式下执行,用户可随时切换为手动模式
5. 用户交互模块
用户交互模块处理按键输入,实现参数设置和模式切换:
// 按键定义 #define KEY1_PIN GPIO_PIN_5 #define KEY1_GPIO_PORT GPIOA #define KEY2_PIN GPIO_PIN_6 #define KEY2_GPIO_PORT GPIOA #define KEY3_PIN GPIO_PIN_7 #define KEY3_GPIO_PORT GPIOA // 按键状态枚举 typedef enum { KEY_NONE = 0, KEY1_PRESS, KEY2_PRESS, KEY3_PRESS, KEY1_LONG_PRESS, KEY2_LONG_PRESS, KEY3_LONG_PRESS } Key_State_TypeDef; // 按键扫描 Key_State_TypeDef Key_Scan(void) { static uint8_t key_up = 1; // 按键松开标志 static uint32_t key1_time = 0, key2_time = 0, key3_time = 0; Key_State_TypeDef key_state = KEY_NONE; if (key_up && (HAL_GPIO_ReadPin(KEY1_GPIO_PORT, KEY1_PIN) == GPIO_PIN_RESET || HAL_GPIO_ReadPin(KEY2_GPIO_PORT, KEY2_PIN) == GPIO_PIN_RESET || HAL_GPIO_ReadPin(KEY3_GPIO_PORT, KEY3_PIN) == GPIO_PIN_RESET)) { HAL_Delay(20); // 消抖 key_up = 0; if (HAL_GPIO_ReadPin(KEY1_GPIO_PORT, KEY1_PIN) == GPIO_PIN_RESET) { key1_time = HAL_GetTick(); // 记录按键按下时间 } else if (HAL_GPIO_ReadPin(KEY2_GPIO_PORT, KEY2_PIN) == GPIO_PIN_RESET) { key2_time = HAL_GetTick(); } else if (HAL_GPIO_ReadPin(KEY3_GPIO_PORT, KEY3_PIN) == GPIO_PIN_RESET) { key3_time = HAL_GetTick(); } } else if (HAL_GPIO_ReadPin(KEY1_GPIO_PORT, KEY1_PIN) == GPIO_PIN_SET && HAL_GPIO_ReadPin(KEY2_GPIO_PORT, KEY2_PIN) == GPIO_PIN_SET && HAL_GPIO_ReadPin(KEY3_GPIO_PORT, KEY3_PIN) == GPIO_PIN_SET) { if (!key_up) { // 判断按键按下时间,区分短按和长按 if (HAL_GetTick() - key1_time < 300 && HAL_GetTick() - key1_time > 20) { key_state = KEY1_PRESS; } else if (HAL_GetTick() - key1_time >= 1000) { key_state = KEY1_LONG_PRESS; } else if (HAL_GetTick() - key2_time < 300 && HAL_GetTick() - key2_time > 20) { key_state = KEY2_PRESS; } else if (HAL_GetTick() - key2_time >= 1000) { key_state = KEY2_LONG_PRESS; } else if (HAL_GetTick() - key3_time < 300 && HAL_GetTick() - key3_time > 20) { key_state = KEY3_PRESS; } else if (HAL_GetTick() - key3_time >= 1000) { key_state = KEY3_LONG_PRESS; } key_up = 1; key1_time = key2_time = key3_time = 0; } } return key_state; } // 按键处理任务 void Key_Process_Task(void) { Key_State_TypeDef key_state = Key_Scan(); switch (key_state) { case KEY1_PRESS: // KEY1短按:切换显示页面 current_page = (current_page + 1) % 3; Buzzer_Beep(50); // 按键提示音 break; case KEY2_PRESS: // KEY2短按:在设置页面中切换参数,或在主页面手动控制灯光 if (current_page == PAGE_SETTINGS) { settings_param_index = (settings_param_index + 1) % 5; Buzzer_Beep(50); } else { // 手动控制灯光 relay_state ^= 0x01; Update_Relay_State(); Buzzer_Beep(50); } break; case KEY3_PRESS: // KEY3短按:在设置页面中修改参数,或在主页面手动控制风扇 if (current_page == PAGE_SETTINGS) { Adjust_Param(settings_param_index, 1); Buzzer_Beep(50); } else { // 手动控制风扇 relay_state ^= 0x02; Update_Relay_State(); Buzzer_Beep(50); } break; case KEY1_LONG_PRESS: // KEY1长按:切换自动/手动模式 sys_params.auto_mode ^= 1; Buzzer_Beep(100); Buzzer_Beep(100); // 两声提示 break; case KEY3_LONG_PRESS: // KEY3长按:在设置页面中减小参数 if (current_page == PAGE_SETTINGS) { Adjust_Param(settings_param_index, -1); Buzzer_Beep(50); } break; default: break; } }
按键设计要点:
实现软件消抖,避免机械按键抖动导致误触发区分短按和长按,实现更多操作功能按键操作伴随蜂鸣器提示,提供反馈同一按键在不同页面有不同功能,提高界面利用率
主程序与任务调度
嵌入式系统通常采用超级循环(Super Loop) 架构实现多任务处理,本系统也采用这种方式:
int main(void) { // 系统初始化 System_Init(); // 主循环 while (1) { // 传感器数据采集任务(100ms执行一次) Sensor_Collect_Task(); // 显示任务(根据需要执行) Display_Task(); // 控制任务(100ms执行一次) Control_Task(); // 按键处理任务(快速响应) Key_Process_Task(); // 延时100ms,控制主循环周期 HAL_Delay(100); } }
任务调度设计考虑:
主循环周期为100ms,兼顾响应速度和系统负载对时间敏感的任务(如按键处理)不加入延迟对时间不敏感的任务(如显示更新)内部实现频率控制传感器采集任务根据不同传感器特性设置不同的采样频率
关键外设驱动实现:深入底层的硬件控制
外设驱动是嵌入式系统的核心,直接决定了硬件资源的利用效率和系统性能。一个高质量的驱动程序应具备稳定性高、效率高、资源占用低、接口清晰四大特点。本节将详细讲解系统中几个关键外设的驱动实现原理和代码。
I2C总线驱动:连接数字世界的桥梁
I2C(Inter-Integrated Circuit)是一种简单、双向、二线制同步串行总线,由Philips公司开发,广泛应用于连接微控制器和外围设备。本系统中,BH1750光照传感器和SSD1306 OLED显示屏均通过I2C总线与STM32通信。
I2C外设初始化
使用STM32CubeMX配置I2C2外设:
void MX_I2C2_Init(void) { hi2c2.Instance = I2C2; hi2c2.Init.ClockSpeed = 400000; // I2C时钟频率400kHz hi2c2.Init.DutyCycle = I2C_DUTYCYCLE_2; // 占空比1:2 hi2c2.Init.OwnAddress1 = 0; // 自身地址(作为从机时使用) hi2c2.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; // 7位地址模式 hi2c2.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; hi2c2.Init.OwnAddress2 = 0; hi2c2.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; hi2c2.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; if (HAL_I2C_Init(&hi2c2) != HAL_OK) { Error_Handler(); } } // I2C GPIO初始化(在HAL_I2C_MspInit中调用) void HAL_I2C_MspInit(I2C_HandleTypeDef* i2cHandle) { GPIO_InitTypeDef GPIO_InitStruct = {0}; if(i2cHandle->Instance == I2C2) { __HAL_RCC_GPIOB_CLK_ENABLE(); /**I2C2 GPIO Configuration PB10 ------> I2C2_SCL PB11 ------> I2C2_SDA */ GPIO_InitStruct.Pin = GPIO_PIN_10|GPIO_PIN_11; GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; // 开漏输出模式 GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); /* I2C2 clock enable */ __HAL_RCC_I2C2_CLK_ENABLE(); } }
I2C配置关键点:
开漏输出(OD):I2C总线要求SDA和SCL引脚必须配置为开漏输出模式,这是实现多设备共用总线的基础上拉电阻:I2C总线需要外部上拉电阻,通常为4.7KΩ,连接在SDA/SCL引脚和VCC之间时钟频率:标准模式为100kHz,快速模式为400kHz,高速模式可达3.4MHz
I2C通用读写函数
基于HAL库封装通用的I2C读写函数,简化传感器操作:
/** * @brief 向I2C设备写入一个字节数据 * @param dev_addr: 设备地址 * @param reg_addr: 寄存器地址 * @param data: 要写入的数据 * @retval HAL_StatusTypeDef: 操作结果 */ HAL_StatusTypeDef I2C_WriteByte(uint8_t dev_addr, uint8_t reg_addr, uint8_t data) { uint8_t tx_buf[2] = {reg_addr, data}; return HAL_I2C_Master_Transmit(&hi2c2, dev_addr << 1, tx_buf, 2, 100); } /** * @brief 从I2C设备读取多个字节数据 * @param dev_addr: 设备地址 * @param reg_addr: 寄存器地址 * @param data: 接收数据缓冲区 * @param len: 要读取的数据长度 * @retval HAL_StatusTypeDef: 操作结果 */ HAL_StatusTypeDef I2C_ReadBytes(uint8_t dev_addr, uint8_t reg_addr, uint8_t *data, uint8_t len) { // 先发送寄存器地址 if (HAL_I2C_Master_Transmit(&hi2c2, dev_addr << 1, ®_addr, 1, 100) != HAL_OK) { return HAL_ERROR; } // 再读取数据 return HAL_I2C_Master_Receive(&hi2c2, dev_addr << 1, data, len, 100); }
BH1750光照传感器驱动:感知光明的眼睛
BH1750是一款数字型环境光传感器IC,内置16位ADC,可直接输出数字量,无需额外AD转换电路。其测量范围宽达0-65535 lx,精度高,功耗低,非常适合智能家居环境监测。
BH1750初始化
/** * @brief BH1750初始化 * @retval HAL_StatusTypeDef: 初始化结果 */ HAL_StatusTypeDef BH1750_Init(void) { HAL_StatusTypeDef status; // 上电延时 HAL_Delay(10); // 发送断电命令,重置传感器 status = I2C_WriteByte(BH1750_ADDR, BH1750_POWER_DOWN, 0); if (status != HAL_OK) return status; HAL_Delay(10); // 发送上电命令 status = I2C_WriteByte(BH1750_ADDR, BH1750_POWER_ON, 0); if (status != HAL_OK) return status; HAL_Delay(10); // 设置测量模式:连续高分辨率模式 status = I2C_WriteByte(BH1750_ADDR, BH1750_CONTINUOUS_HIGH_RES_MODE, 0); if (status != HAL_OK) return status; return HAL_OK; }
BH1750关键命令:
断电模式(POWER DOWN):传感器进入低功耗状态,功耗<1μA上电模式(POWER ON):传感器唤醒,但不进行测量重置命令(RESET):重置数据寄存器,但不改变测量模式测量模式:有多种测量模式可选,包括单次测量和连续测量,每种模式又分高分辨率和低分辨率
BH1750数据读取
/** * @brief 读取BH1750光照强度 * @param light: 存储光照强度的指针(lx) * @retval HAL_StatusTypeDef: 读取结果 */ HAL_StatusTypeDef BH1750_ReadLight(uint16_t *light) { HAL_StatusTypeDef status; uint8_t data[2]; // 读取2字节数据 status = I2C_ReadBytes(BH1750_ADDR, 0x00, data, 2); if (status != HAL_OK) { *light = 0; return status; } // 转换为光照强度(lx) // 高分辨率模式下,计算公式:光照强度 = (data[0] << 8 | data[1]) / 1.2 *light = (uint16_t)(((data[0] << 8) | data[1]) / 1.2f); return HAL_OK; }
数据转换公式:BH1750输出的原始数据是16位无符号整数,需要根据测量模式进行转换。在高分辨率模式下,光照强度(lx) = (高字节<<8 | 低字节) / 1.2。
OLED显示屏驱动:信息展示的窗口
SSD1306是一款广泛使用的OLED控制器,支持I2C和SPI两种通信接口。本系统使用0.96英寸OLED显示屏,分辨率128×64,通过I2C接口与STM32连接。
OLED初始化
/** * @brief OLED初始化 */ void OLED_Init(void) { // 复位OLED HAL_GPIO_WritePin(OLED_RST_GPIO_Port, OLED_RST_Pin, GPIO_PIN_RESET); HAL_Delay(100); HAL_GPIO_WritePin(OLED_RST_GPIO_Port, OLED_RST_Pin, GPIO_PIN_SET); HAL_Delay(100); // 初始化命令序列 uint8_t init_cmds[] = { 0xAE, // 关闭显示 0x00, 0x10, // 设置列地址低/高 nibble 0x40, // 设置显示起始行 0xB0, // 设置页地址(0xB0~0xB7) 0x81, 0xCF, // 设置对比度控制 0xA1, // 设置段重映射(0xA0/0xA1) 0xC8, // 设置COM输出扫描方向(0xC0/0xC8) 0xA6, // 设置正常显示(0xA6为正常,0xA7为反相) 0xA8, 0x3F, // 设置多路复用率 0xD3, 0x00, // 设置显示偏移 0xD5, 0x80, // 设置显示时钟分频/振荡器频率 0xD9, 0xF1, // 设置预充电周期 0xDA, 0x12, // 设置COM引脚硬件配置 0xDB, 0x40, // 设置VCOMH取消选择级别 0x8D, 0x14, // 电荷泵设置 0xAF // 开启显示 }; // 发送初始化命令 OLED_WriteCommand(init_cmds, sizeof(init_cmds)); // 清屏 OLED_Clear(); } /** * @brief 向OLED写入命令 * @param cmd: 命令缓冲区 * @param len: 命令长度 */ void OLED_WriteCommand(uint8_t *cmd, uint8_t len) { uint8_t tx_buf[len + 1]; tx_buf[0] = 0x00; // 命令字节(Co=0, D/C#=0) memcpy(&tx_buf[1], cmd, len); HAL_I2C_Master_Transmit(&hi2c2, OLED_ADDR, tx_buf, len + 1, 100); } /** * @brief 向OLED写入数据 * @param data: 数据缓冲区 * @param len: 数据长度 */ void OLED_WriteData(uint8_t *data, uint8_t len) { uint8_t tx_buf[len + 1]; tx_buf[0] = 0x40; // 数据字节(Co=0, D/C#=1) memcpy(&tx_buf[1], data, len); HAL_I2C_Master_Transmit(&hi2c2, OLED_ADDR, tx_buf, len + 1, 100); }
SSD1306初始化命令解析:
0xAE/0xAF:关闭/开启显示0x81 + 0xCF:设置对比度,0x00~0xFF可调0xA1/A0:设置段重映射,控制显示方向0xC8/C0:设置COM扫描方向,控制显示上下翻转0x8D + 0x14:开启电荷泵,OLED需要较高电压驱动
OLED图形显示函数
实现基本的图形和文字显示功能:
/** * @brief 设置OLED显示位置 * @param x: X坐标(0~127) * @param y: Y坐标(0~7,代表8页) */ void OLED_SetPos(uint8_t x, uint8_t y) { uint8_t cmd[3]; cmd[0] = 0xB0 + y; // 设置页地址 cmd[1] = 0x00 + (x & 0x0F); // 设置列地址低4位 cmd[2] = 0x10 + ((x >> 4) & 0x0F); // 设置列地址高4位 OLED_WriteCommand(cmd, 3); } /** * @brief 清屏函数 */ void OLED_Clear(void) { uint8_t y, x; uint8_t clear_data[128] = {0}; for (y = 0; y < 8; y++) { // OLED共8页 OLED_SetPos(0, y); OLED_WriteData(clear_data, 128); // 每页128列 } } /** * @brief 在指定位置显示一个字符 * @param x: X坐标(0~127) * @param y: Y坐标(0~63) * @param chr: 要显示的字符 * @param size: 字体大小(12/16/24) */ void OLED_ShowChar(uint8_t x, uint8_t y, uint8_t chr, uint8_t size) { uint8_t c = 0, i = 0, j = 0; c = chr - ' '; // 获取字符在字库中的索引 if (size == 12) { // 12x12字体 OLED_SetPos(x, y/8); for (i = 0; i < 12; i++) { uint8_t data = asc2_1206[c][i]; OLED_WriteData(&data, 1); } } else if (size == 16) { // 16x16字体 OLED_SetPos(x, y/8); for (i = 0; i < 8; i++) { uint8_t data = asc2_1608[c][i]; OLED_WriteData(&data, 1); } OLED_SetPos(x, y/8 + 1); for (i = 0; i < 8; i++) { uint8_t data = asc2_1608[c][i + 8]; OLED_WriteData(&data, 1); } } // 可扩展更多字体大小... } /** * @brief 在指定位置显示字符串 * @param x: X坐标 * @param y: Y坐标 * @param str: 要显示的字符串 */ void OLED_ShowString(uint8_t x, uint8_t y, const char *str) { uint8_t i = 0; while (str[i] != '') { OLED_ShowChar(x, y, str[i], 16); // 默认使用16x16字体 x += 8; // 字符宽度为8像素 if (x > 120) { // 超出屏幕右边界,换行 x = 0; y += 16; } i++; } }
OLED显存组织:SSD1306将128×64的屏幕分为8页(Page 0~7),每页包含128列,每列8行像素,对应一个字节数据。这种分页结构决定了我们的显示函数需要按页操作显存。
DHT11温湿度传感器驱动:感知环境的呼吸
DHT11是一款低成本温湿度传感器,采用单总线通信方式,只需一根数据线即可实现双向通信。虽然精度不高(温度±2℃,湿度±5%RH),但足以满足一般家居环境监测需求。
DHT11通信时序
DHT11的通信时序较为特殊,需要精确控制GPIO的高低电平持续时间:
/** * @brief 从DHT11读取温湿度数据 * @param temp: 温度值指针 * @param humi: 湿度值指针 * @retval HAL_StatusTypeDef: 读取结果 */ HAL_StatusTypeDef DHT11_Read_Data(float *temp, float *humi) { uint8_t buf[5] = {0}; uint8_t i; // 主机发送开始信号 DHT11_TX_MODE(); // 设置为输出模式 HAL_GPIO_WritePin(DHT11_GPIO_Port, DHT11_Pin, GPIO_PIN_RESET); HAL_Delay(18); // 拉低至少18ms HAL_GPIO_WritePin(DHT11_GPIO_Port, DHT11_Pin, GPIO_PIN_SET); HAL_Delay(30); // 拉高20~40us // 等待DHT11响应 DHT11_RX_MODE(); // 设置为输入模式 // 检测DHT11响应信号 if (HAL_GPIO_ReadPin(DHT11_GPIO_Port, DHT11_Pin) == GPIO_PIN_SET) { return HAL_ERROR; // 未收到响应 } // 等待响应信号低电平结束(80us) while (HAL_GPIO_ReadPin(DHT11_GPIO_Port, DHT11_Pin) == GPIO_PIN_RESET); // 等待响应信号高电平结束(80us) while (HAL_GPIO_ReadPin(DHT11_GPIO_Port, DHT11_Pin) == GPIO_PIN_SET); // 读取40位数据 for (i = 0; i < 40; i++) { // 等待数据位低电平结束(50us) while (HAL_GPIO_ReadPin(DHT11_GPIO_Port, DHT11_Pin) == GPIO_PIN_RESET); // 延时30us,判断高电平持续时间 Delay_Us(30); buf[i/8] <<= 1; // 左移一位 // 高电平持续时间超过30us表示数据位1,否则为0 if (HAL_GPIO_ReadPin(DHT11_GPIO_Port, DHT11_Pin) == GPIO_PIN_SET) { buf[i/8] |= 0x01; // 置1 while (HAL_GPIO_ReadPin(DHT11_GPIO_Port, DHT11_Pin) == GPIO_PIN_SET); // 等待高电平结束 } } // 校验数据 if (buf[4] == (buf[0] + buf[1] + buf[2] + buf[3])) { *humi = (float)buf[0] + (float)buf[1] / 10; // 湿度 = 整数部分 + 小数部分/10 *temp = (float)buf[2] + (float)buf[3] / 10; // 温度 = 整数部分 + 小数部分/10 return HAL_OK; } else { return HAL_ERROR; // 校验失败 } }
DHT11通信时序关键点:
起始信号:主机拉低总线至少18ms,然后拉高20-40us响应信号:DHT11拉低总线80us,然后拉高80us作为响应数据传输:DHT11输出40位数据,高位在前,格式为:湿度整数(8位)+湿度小数(8位)+温度整数(8位)+温度小数(8位)+校验和(8位)位判断:数据0的高电平持续约26-28us,数据1的高电平持续约70us
微秒级延时实现
DHT11通信需要精确的微秒级延时,而HAL_Delay()函数的最小延时单位是毫秒,因此需要实现微秒级延时:
/** * @brief 微秒级延时 * @param us: 延时微秒数(最大约65535us) */ void Delay_Us(uint16_t us) { uint16_t i = 0; // 使用定时器2实现精确延时 __HAL_TIM_SET_COUNTER(&htim2, 0); // 计数器清零 HAL_TIM_Base_Start(&htim2); // 启动定时器 while (__HAL_TIM_GET_COUNTER(&htim2) < us); // 等待计数器达到指定值 HAL_TIM_Base_Stop(&htim2); // 停止定时器 } // 定时器2初始化(用于微秒延时) void MX_TIM2_Init(void) { htim2.Instance = TIM2; htim2.Init.Prescaler = 72 - 1; // 72MHz / 72 = 1MHz,计数器每1us加1 htim2.Init.CounterMode = TIM_COUNTERMODE_UP; htim2.Init.Period = 65535; // 最大计数值65535 htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_Base_Init(&htim2) != HAL_OK) { Error_Handler(); } }
微秒延时实现原理:利用STM32的定时器,将其配置为1MHz计数频率(每计数1次代表1微秒),通过读取计数器值实现精确延时。
系统集成与测试:从模块到产品的蜕变
系统集成是将各个独立开发的模块有机结合,形成完整功能的过程,也是验证设计合理性和解决兼容性问题的关键阶段。本节将详细介绍系统集成方法、测试流程和结果分析。
系统集成策略
嵌入式系统集成通常采用自底向上的策略,从最底层的硬件驱动开始,逐步向上集成功能模块,最终形成完整系统。这种方法的优势是问题定位准确,便于分阶段测试和验证。
集成步骤
硬件连通性测试:确保所有外设正确连接到STM32,无短路、断路问题驱动层测试:验证每个外设驱动是否能独立正常工作模块层集成:将相关驱动组合成功能模块,如传感器采集模块、显示模块等系统层集成:将各功能模块组合,实现完整系统功能系统优化:针对性能瓶颈和稳定性问题进行优化
硬件连通性测试
硬件连通性测试主要验证物理连接是否正确,可借助STM32的GPIO读写功能:
/** * @brief 硬件连通性测试 */ void Hardware_Connect_Test(void) { OLED_Clear(); OLED_ShowString(0, 0, "Hardware Test"); // 测试DHT11连接 if (DHT11_Init() == HAL_OK) { OLED_ShowString(0, 2, "DHT11: OK"); } else { OLED_ShowString(0, 2, "DHT11: ERROR"); } // 测试BH1750连接 if (BH1750_Init() == HAL_OK) { OLED_ShowString(0, 4, "BH1750: OK"); } else { OLED_ShowString(0, 4, "BH1750: ERROR"); } // 测试按键 OLED_ShowString(0, 6, "Press any key..."); while (Key_Scan() == KEY_NONE); // 等待按键按下 // 测试继电器 RELAY1_ON(); RELAY2_ON(); HAL_Delay(1000); RELAY1_OFF(); RELAY2_OFF(); // 测试蜂鸣器 Buzzer_Beep(500); OLED_Clear(); OLED_ShowString(0, 2, "Hardware Test OK"); HAL_Delay(2000); }
常见硬件连接问题:
电源问题:外设供电电压错误(3.3V与5V混淆)接线错误:SDA/SCL接反,TX/RX接反上拉电阻缺失:I2C/SPI总线没有上拉电阻短路:VCC与GND意外连接导致系统无法启动接触不良:杜邦线接触不良导致间歇性故障
系统测试方案
一个全面的测试方案应覆盖功能测试、性能测试和可靠性测试三大方面,确保系统在各种条件下都能稳定工作。
功能测试用例
| 测试用例ID | 测试项目 | 测试步骤 | 预期结果 | 实际结果 | 测试状态 |
|---|---|---|---|---|---|
| TC-F-001 | 系统初始化 | 1. 上电复位<br>2. 观察OLED显示 | 1. 蜂鸣器发出提示音<br>2. OLED显示初始化信息<br>3. 2秒后进入主界面 | 蜂鸣器发声,OLED显示正常 | 通过 |
| TC-F-002 | 温湿度采集 | 1. 系统正常运行<br>2. 观察主界面温湿度值 | 温度显示范围:050℃<br>湿度显示范围:2090%<br>数值稳定无跳变 | 温度25.3℃,湿度45.6%,稳定 | 通过 |
| TC-F-003 | 光照采集 | 1. 系统正常运行<br>2. 用手遮挡传感器<br>3. 移开手 | 遮挡时光照值降低至<100lx<br>移开后恢复至>500lx | 遮挡时85lx,移开后580lx | 通过 |
| TC-F-004 | 自动灯光控制 | 1. 确保在自动模式<br>2. 遮挡光照传感器<br>3. 移开遮挡 | 遮挡时光照<阈值,灯光打开<br>移开后光照>阈值,灯光关闭 | 遮挡时灯光开启,移开后关闭 | 通过 |
| TC-F-005 | 自动风扇控制 | 1. 确保在自动模式<br>2. 用手捂住温湿度传感器<br>3. 移开手 | 温度>阈值,风扇开启<br>温度<阈值,风扇关闭 | 温度升高至29℃时风扇开启 | 通过 |
| TC-F-006 | 手动控制 | 1. 短按KEY2<br>2. 短按KEY3 | KEY2控制灯光切换<br>KEY3控制风扇切换 | 按键响应灵敏,状态切换正确 | 通过 |
| TC-F-007 | 模式切换 | 1. 长按KEY1<br>2. 观察OLED显示 | 自动/手动模式切换<br>OLED显示模式指示 | 模式切换正常,有图标指示 | 通过 |
| TC-F-008 | 参数设置 | 1. KEY1切换到设置页面<br>2. KEY2选择参数<br>3. KEY3调整参数 | 可切换不同参数项<br>参数值可增减调整 | 参数设置功能正常 | 通过 |
性能测试
性能测试关注系统的响应速度、稳定性和资源占用情况:
响应时间测试:
传感器数据更新延迟:<500ms按键响应延迟:<100ms自动控制响应延迟:<1s
CPU占用率测试:
通过测量空闲任务运行时间估算CPU占用率正常运行时CPU占用率:<30%显示更新时CPU占用率峰值:<60%
内存使用测试:
静态内存使用:约1.2KB动态内存使用:约0.8KB内存余量:>18KB(对于20KB SRAM的STM32F103C8T6)
可靠性测试
可靠性测试验证系统在长时间运行和恶劣条件下的稳定性:
长时间运行测试:
连续运行72小时每小时记录一次系统状态无死机、数据异常等问题
电源波动测试:
输入电压在4.5V~5.5V之间波动系统应能稳定工作,不出现复位
抗干扰测试:
近距离使用手机通话测试电磁干扰继电器动作时观察系统是否受影响
常见问题与解决方案
在系统集成过程中,不可避免会遇到各种问题,快速定位并解决这些问题是嵌入式开发的核心能力之一。
硬件问题
传感器数据跳变严重
现象:温湿度或光照数据频繁跳变,超出正常范围可能原因:
传感器供电不稳定信号线受到干扰接地不良
解决方案:
在传感器电源引脚添加10uF电解电容和0.1uF陶瓷电容传感器信号线尽量短,远离继电器等强干扰源采用单点接地,避免接地环路
OLED显示乱码或不显示
现象:OLED屏幕无显示或显示乱码可能原因:
I2C地址错误复位引脚未正确连接对比度设置不当
解决方案:
通过I2C扫描工具确认设备地址检查复位引脚连接,确保初始化时正确复位调整对比度设置命令(0x81)的参数值
软件问题
DHT11读取失败率高
现象:DHT11经常读取失败,返回错误可能原因:
延时函数不准确总线被其他设备干扰读取时序错误
解决方案:
使用定时器实现精确延时,替代软件延时在读取前后禁用中断,避免时序被打断增加重试机制,最多尝试3次读取
// 改进的DHT11读取函数,增加重试机制 HAL_StatusTypeDef DHT11_Read_Data_With_Retry(float *temp, float *humi) { uint8_t retry = 3; while (retry--) { if (DHT11_Read_Data(temp, humi) == HAL_OK) { return HAL_OK; } HAL_Delay(100); // 重试前延时 } return HAL_ERROR; // 多次重试失败 }
系统偶尔死机
现象:系统运行一段时间后无响应可能原因:
内存溢出死循环中断处理不当
解决方案:
使用内存监控工具检查内存使用情况在关键循环中添加看门狗喂狗操作优化中断处理函数,避免长时间占用中断
// 添加独立看门狗防止系统死机 void MX_IWDG_Init(void) { hiwdg.Instance = IWDG; hiwdg.Init.Prescaler = IWDG_PRESCALER_32; // 分频系数32 hiwdg.Init.Reload = 4095; // 重载值4095 hiwdg.Init.Window = IWDG_WINDOW_DISABLE; if (HAL_IWDG_Init(&hiwdg) != HAL_OK) { Error_Handler(); } } // 在主循环中喂狗 int main(void) { // ...初始化代码... while (1) { // ...任务代码... HAL_IWDG_Refresh(&hiwdg); // 喂狗,必须在看门狗超时前调用 HAL_Delay(100); } }
按键响应不灵敏
现象:按键需要用力按或按多次才有响应可能原因:
消抖处理不当扫描频率过低按键硬件接触不良
解决方案:
同时实现硬件消抖(100nF电容)和软件消抖提高按键扫描频率,或使用外部中断方式更换质量更好的按键或增加按键按下反馈
项目扩展与优化:打造更智能的系统
一个成功的嵌入式项目不应止步于基本功能实现,而应考虑未来扩展和持续优化的可能性。本节将探讨本系统的多种扩展方向和优化策略,帮助你将项目提升到更高水平。
功能扩展方向
1. 空气质量监测
在现有环境监测基础上,增加空气质量监测功能,使系统更加全面:
PM2.5传感器:如GP2Y1010AU0F或PMS5003有害气体传感器:如MQ-2(烟雾)、MQ-4(甲烷)、MQ-135(空气质量)数据展示:在OLED上增加空气质量指数(AQI)显示报警功能:空气质量超标时启动蜂鸣器报警
硬件连接:以PMS5003为例,通过UART接口连接:
PMS5003 TX <---> STM32 USART1 RX (PA10) PMS5003 RX <---> STM32 USART1 TX (PA9) PMS5003 VCC <---> 5V PMS5003 GND <---> GND
软件实现:
// PMS5003数据结构体 typedef struct { uint16_t pm1_0; // PM1.0浓度(标准环境) uint16_t pm2_5; // PM2.5浓度(标准环境) uint16_t pm10; // PM10浓度(标准环境) uint16_t pm1_0_atm;// PM1.0浓度(大气环境) uint16_t pm2_5_atm;// PM2.5浓度(大气环境) uint16_t pm10_atm; // PM10浓度(大气环境) uint8_t data_ready;// 数据就绪标志 } PMS5003_Data_TypeDef; // UART接收中断回调函数 void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if (huart == &huart1) { // 处理PMS5003数据 PMS5003_Process_Received_Data(); HAL_UART_Receive_IT(&huart1, &pms_rx_byte, 1); // 重新开启中断接收 } }
2. Wi-Fi连接与云平台对接
增加Wi-Fi模块,实现数据上传到云平台,支持远程监控:
Wi-Fi模块:ESP8266或ESP32云平台选择:阿里云IoT、腾讯云IoT、Blynk等功能实现:
环境数据定时上传远程控制家电手机APP实时监控历史数据查询和分析
实现方案:
使用AT指令控制ESP8266模块通过MQTT协议连接云平台定义数据格式和控制命令
// ESP8266初始化示例 void ESP8266_Init(void) { // 发送AT指令检查模块是否在线 ESP8266_Send_AT_Command("AT
", "OK", 1000); // 设置Wi-Fi模式为Station ESP8266_Send_AT_Command("AT+CWMODE=1
", "OK", 1000); // 连接Wi-Fi char cmd[64]; sprintf(cmd, "AT+CWJAP="%s","%s"
", WIFI_SSID, WIFI_PASSWORD); ESP8266_Send_AT_Command(cmd, "OK", 5000); // 连接MQTT服务器 sprintf(cmd, "AT+MQTTUSERCFG=0,1,"%s","%s","%s",0,0,""
", CLIENT_ID, USERNAME, PASSWORD); ESP8266_Send_AT_Command(cmd, "OK", 2000); sprintf(cmd, "AT+MQTTCONN=0,"%s",%d,1
", MQTT_SERVER, MQTT_PORT); ESP8266_Send_AT_Command(cmd, "OK", 2000); } // 上传环境数据到云平台 void Upload_Env_Data_To_Cloud(void) { char data[128]; sprintf(data, "{"temp":%.1f,"humi":%.1f,"light":%d,"pm25":%d}", sensor_data.temperature, sensor_data.humidity, sensor_data.light, pms_data.pm2_5); char cmd[256]; sprintf(cmd, "AT+MQTTPUB=0,"%s","%s",0,0
", PUBLISH_TOPIC, data); ESP8266_Send_AT_Command(cmd, "OK", 1000); }
3. 语音控制功能
增加语音识别模块,实现语音控制家电:
语音模块:LD3320或离线语音识别模块功能实现:
支持”开灯”、”关灯”、”开风扇”、”关风扇”等指令语音唤醒功能语音反馈
连接方式:LD3320通过SPI或UART与STM32连接,通常使用SPI接口以获得更高速度。
系统优化策略
一个优秀的嵌入式系统不仅要能实现功能,还要在性能、稳定性和功耗等方面进行优化。
低功耗优化
对于电池供电的设备,低功耗优化至关重要,即使是市电供电系统,降低功耗也有助于减少发热和提高稳定性:
硬件层面:
选择低功耗外设,如使用BH1750代替光敏电阻+ADC未使用的引脚设置为模拟输入,减少漏电流传感器采用间歇工作模式,而非持续工作
软件层面:
使用STM32的低功耗模式(Sleep/Stop/Standby)优化主循环,减少CPU空转时间外设按需开启,不使用时关闭时钟
// 低功耗模式配置 void Enter_Low_Power_Mode(void) { // 关闭不必要的外设时钟 __HAL_RCC_I2C2_CLK_DISABLE(); __HAL_RCC_USART1_CLK_DISABLE(); // 配置低功耗模式 HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI); // 从Stop模式唤醒后,需要重新配置系统时钟 SystemClock_Config(); // 重新开启外设时钟 __HAL_RCC_I2C2_CLK_ENABLE(); __HAL_RCC_USART1_CLK_ENABLE(); } // 优化的主循环,增加低功耗模式 int main(void) { System_Init(); while (1) { // 传感器数据采集任务 Sensor_Collect_Task(); // 显示任务 Display_Task(); // 控制任务 Control_Task(); // 按键处理任务 Key_Process_Task(); // 上传数据任务(每30秒一次) static uint32_t last_upload_time = 0; if (HAL_GetTick() - last_upload_time > 30000) { last_upload_time = HAL_GetTick(); Upload_Env_Data_To_Cloud(); } // 进入低功耗模式,直到下一次定时唤醒 Enter_Low_Power_Mode(); } }
代码优化
良好的代码质量不仅提高可读性和可维护性,还能提升系统性能:
模块化设计:
功能模块独立,接口清晰避免全局变量,使用函数参数传递数据公共功能抽象为库函数
效率优化:
使用查表法代替复杂计算减少浮点数运算,尽量使用整数优化循环结构,减少嵌套层次
健壮性优化:
增加参数合法性检查关键操作添加超时处理数据传输添加校验机制
// 优化前:使用浮点数计算 float calculate_temperature(uint16_t adc_value) { return (adc_value * 3.3f / 4096.0f - 0.5f) * 100.0f; } // 优化后:使用整数计算,避免浮点运算 int calculate_temperature(uint16_t adc_value) { // 扩大10倍,使用整数运算,减少精度损失 return ((adc_value * 330 / 4096 - 50) * 100) / 10; }
结论:从实践中学习的嵌入式开发之旅
智能家居环境监测与控制系统的开发过程,是一次全面的嵌入式系统实践,涵盖了硬件设计、软件编程、系统集成和测试优化的完整流程。通过这个项目,我们不仅掌握了STM3微控制器的外设控制方法,更重要的是建立了嵌入式系统的整体设计思维。
项目成果总结
本项目成功实现了一个功能完善的智能家居环境监测与控制系统,主要成果包括:
硬件系统:构建了以STM32F103C8T6为核心,包含温湿度传感器、光照传感器、OLED显示、继电器控制、蜂鸣器报警和按键输入的完整硬件平台。
软件系统:开发了模块化的嵌入式软件,实现了环境数据采集、OLED信息显示、自动控制逻辑、用户交互和异常报警等功能。
核心技术:掌握了I2C总线通信、单总线通信、GPIO控制、定时器应用等关键嵌入式技术,理解了各外设的工作原理和驱动方法。
系统集成:成功将各独立模块集成在一起,解决了硬件兼容性和软件协同工作问题,形成了一个稳定可靠的完整系统。
经验与教训
在项目开发过程中,我们积累了宝贵的嵌入式系统开发经验,也吸取了一些教训:
硬件设计先行:前期充分的硬件规划可以避免后期频繁的硬件修改,特别是外设接口和电源设计要仔细考虑。
驱动开发关键:稳定可靠的外设驱动是系统成功的基础,花足够时间调试驱动,确保底层功能稳定。
模块化编程:坚持模块化和分层设计原则,使代码结构清晰,易于维护和扩展。
测试驱动开发:为每个功能模块编写测试用例,确保模块功能正确后再进行集成,可以大大提高开发效率。
文档的重要性:及时记录开发过程中的设计思路、问题和解决方案,形成完善的开发文档。
未来展望
嵌入式系统技术正在快速发展,智能家居领域更是日新月异。本项目作为一个基础平台,可以向多个方向发展:
人工智能引入:通过机器学习算法,让系统能够根据用户习惯自动调整控制策略,实现个性化智能控制。
多传感器融合:增加更多类型的传感器,如人体存在传感器、声音传感器等,实现更全面的环境感知。
边缘计算:在本地实现更复杂的数据处理和决策功能,减少对云端的依赖,提高响应速度和隐私安全性。
能量 harvesting:研究能量收集技术,如太阳能、温差发电等,实现无电池长期运行。
嵌入式开发是一个实践性极强的领域,只有通过亲手实践,才能真正掌握其中的精髓。这个智能家居环境监测与控制系统项目,为我们打开了嵌入式世界的大门,而真正的探索才刚刚开始。无论未来技术如何发展,扎实的硬件基础、清晰的软件架构和严谨的系统思维,都是嵌入式工程师不可或缺的核心能力。希望这个项目能够激发你对嵌入式开发的兴趣,开启你的嵌入式系统开发之旅。
最后,记住嵌入式开发的本质是控制物理世界,每一行代码都能转化为实实在在的物理动作。这种”代码改变世界”的能力,正是嵌入式开发的魅力所在。















暂无评论内容