
基于L4T Multimedia API的多路摄像头画面拼接编码及RTSP服务
一、背景与需求1、什么是多路摄像头画面拼接?2、为什么要做这个?3、技术挑战
二、优化思路详解1、核心思想:零拷贝架构2、关键技术解析2.1、DMA缓冲区直接访问2.2、GPU内存统一管理2.3、硬件加速转换和拼接2.4、硬件编码
三、系统架构1、数据处理流程2、各模块职责2.1、摄像头采集模块 (V4l2CameraSource)2.2、画面拼接模块 (MultiCameraStreamer)2.3、视频编码模块 (HwVideoEncoder)2.4、网络服务模块
3、性能优势4、硬件要求
四、步骤简介1、环境准备2. 配置文件说明2.1、摄像头布局配置 (camera_cfg.json)2.2、RTSP服务器配置 (mk_mediakit.ini)
3. 核心代码解析3.1、摄像头初始化3.2、画面拼接核心逻辑3.3、编码和网络传输
4. 编译和运行4.1、编译命令解释4.2、运行程序4.3、观看视频流
5. 高级功能5.1、动态码率调整5.2、强制关键帧5.3、实时统计信息
五、资源使用情况六、完整实现1、生成主程序代码2、生成主程序配置文件3、生成RTSP服务器配置文件4、编译5、运行
一、背景与需求
1、什么是多路摄像头画面拼接?
想象一下您的汽车有6个摄像头(前、后、左、右等),每个摄像头都在独立录制。多路摄像头画面拼接就是将这6个独立的视频画面智能地组合成一个大的全景画面,就像在监控中心看到的那种多画面监控屏一样。
2、为什么要做这个?
全景监控:在自动驾驶、安防监控等场景中,需要同时查看多个角度的画面节省带宽:传输1个拼接后的视频流比传输6个独立的视频流更节省网络资源降低延迟:通过硬件加速处理,减少视频处理的延迟
3、技术挑战
高性能要求:需要实时处理6个1080P视频流,对计算能力要求很高低延迟:从采集到显示的全链路延迟要尽可能小低CPU占用:不能因为视频处理而影响其他重要任务
二、优化思路详解
1、核心思想:零拷贝架构
传统视频处理就像搬箱子:每次处理都需要把数据从A地搬到B地,很耗时。我们的目标是让数据”原地处理”,减少不必要的搬运。
2、关键技术解析
2.1、DMA缓冲区直接访问
// 使用DMA缓冲区,GPU可以直接访问摄像头数据
buffer_request.memory = V4L2_MEMORY_DMABUF;
通俗解释:就像给GPU开了一个”快捷通道”,让它能直接读取摄像头数据,不需要经过CPU中转。
2.2、GPU内存统一管理
// 所有处理都在GPU内存中进行
NvBufSurf::NvAllocate(&cam_params, actual_buffer_count, input_fds.data());
通俗解释:所有视频数据都放在GPU的”工作台”上处理,不需要在CPU和GPU之间来回搬运。
2.3、硬件加速转换和拼接
// 使用GPU进行画面格式转换和拼接
NvBufSurfTransformMultiInputBufCompositeBlend(batch_surf.data(), pdstSurf, &composite_params);
通俗解释:利用GPU的专用电路来快速完成画面格式转换和拼接,就像用专业工具而不是手工操作。
2.4、硬件编码
// 使用NVIDIA硬件编码器
video_encoder_ = NvVideoEncoder::createVideoEncoder("enc0");
通俗解释:用专门的编码芯片来压缩视频,比用CPU软件编码快得多,也省电得多。
三、系统架构
1、数据处理流程
摄像头采集 → DMA缓冲区 → 格式转换 → 画面拼接 → 硬件编码 → RTSP网络传输
↑ ↑ ↑ ↑ ↑ ↑
零拷贝 零拷贝 GPU加速 GPU加速 专用芯片 网络推流
2、各模块职责
2.1、摄像头采集模块 (V4l2CameraSource)
负责从物理摄像头读取数据使用DMA缓冲区避免内存拷贝自动进行YUV422到YUV420格式转换
2.2、画面拼接模块 (MultiCameraStreamer)
按照预定义的布局将6个画面拼接成1个支持自定义每个画面的位置和大小使用GPU进行高效的图像合成
2.3、视频编码模块 (HwVideoEncoder)
使用NVIDIA硬件编码器支持H.264和H.265(HEVC)编码动态码率控制
2.4、网络服务模块
提供RTSP视频流服务支持多客户端同时观看可按需调整视频质量
3、性能优势
CPU占用极低:主要计算都由GPU和专用硬件完成内存效率高:零拷贝架构大幅减少内存带宽占用延迟低:全链路硬件加速,处理延迟在毫秒级别
4、硬件要求
NVIDIA Jetson平台(内置专用视频处理硬件)多个USB摄像头或MIPI摄像头足够的GPU内存(建议4GB以上)
四、步骤简介
1、环境准备
确保您的Jetson设备已安装:
JetPack SDK(包含L4T Multimedia API)CUDA工具包必要的开发库
2. 配置文件说明
2.1、摄像头布局配置 (camera_cfg.json)
{
"global": {
"camera_bufers": 2, // 每个摄像头的缓冲区数量
"encoder_buffers": 2, // 编码器缓冲区数量
"use_hevc": false, // 是否使用H.265编码
"fps": 15, // 输出帧率
"max_bitrate_mps": 2, // 最大码率( Mbps)
"print_interval_sec": 30 // 统计信息打印间隔
},
"layout": {
"left_front": {"x":0, "y":190, "width":432, "height":274},
// ... 其他摄像头位置配置
},
"DEV": {
"left_front": {"dev":"/dev/video1", "width":1920, "height":1080},
// ... 其他摄像头设备配置
}
}
配置说明:
layout
DEV
2.2、RTSP服务器配置 (mk_mediakit.ini)
[rtp_proxy]
lowLatency=1 # 开启低延迟模式
gop_cache=1 # 开启GOP缓存,改善播放体验
3. 核心代码解析
3.1、摄像头初始化
// 创建摄像头源实例
video_sources.push_back(std::make_unique<V4l2CameraSource>(
config.camera_configs[name].device,
config.camera_configs[name].width,
config.camera_configs[name].height));
// 初始化摄像头
video_sources[i]->Initialize(position.width, position.height);
3.2、画面拼接核心逻辑
// 等待所有摄像头都准备好新帧
waitForAllCamerasReady(video_sources);
// 从编码器获取输出缓冲区
int output_plane_index = m_encoder->deQueue(v4l2_buf);
// 获取所有摄像头的当前帧
for (int i = 0; i < video_sources.size(); i++) {
int buffer_index = video_sources[i]->GetLatestFrame(&out_dmabuf_fd, camera_ts);
// 将帧数据添加到批处理列表
batch_surf.push_back(nvbuf_surf);
}
// 使用GPU进行多画面拼接
composite_params.params.input_buf_count = buffer_index_arr.size();
ret = NvBufSurfTransformMultiInputBufCompositeBlend(batch_surf.data(), pdstSurf, &composite_params);
3.3、编码和网络传输
// 编码回调函数,将编码后的数据通过RTSP发送
static void rtspWriteCallback(const uint8_t *encoded_data, size_t data_size,
bool is_key_frame, void *user_data) {
// 创建RTSP帧
mk_frame frame = mk_frame_create(
VideoConstants::USE_HEVC ? MKCodecH265 : MKCodecH264,
obj->dts, obj->dts,
(const char *)encoded_data, data_size, NULL, NULL);
// 输入到媒体流
mk_media_input_frame(obj->media, frame);
}
4. 编译和运行
4.1、编译命令解释
g++ -o l4t_media_srv l4t_media_srv.cpp
-std=c++17
-I ../3rdparty/include
-I/usr/src/jetson_multimedia_api/include # L4T Multimedia API头文件
-I /usr/local/cuda/include # CUDA头文件
-I /usr/include/jsoncpp # JSON解析库
# ... 链接必要的库文件
-lcudart -lv4l2 -lpthread -lnvbufsurface -lnvbufsurftransform -lnvv4l2 -lmk_api -ljsoncpp
关键库说明:
libnvbufsurface.so
libnvbufsurftransform.so
libnvv4l2.so
libmk_api.so
4.2、运行程序
./l4t_media_srv DEV
4.3、观看视频流
使用VLC或其他RTSP播放器打开:
rtsp://你的Jetson设备IP:8554/live/multi_view
5. 高级功能
5.1、动态码率调整
支持通过RTSP URL参数动态调整码率:
rtsp://ip:8554/live/multi_view?bitrate=1500
这会在客户端连接时自动将码率调整为1500Kbps。
5.2、强制关键帧
当新的客户端连接时,会自动插入关键帧,减少连接延迟。
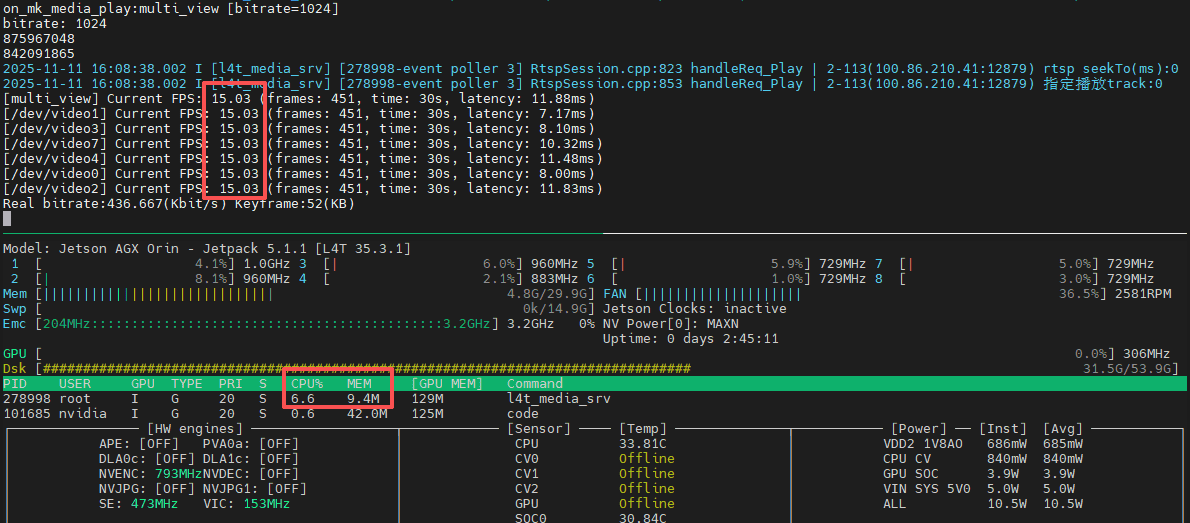
5.3、实时统计信息
程序会定期输出:
实时帧率(FPS)处理延迟实际输出码率关键帧信息
五、资源使用情况
六、完整实现
1、生成主程序代码
cat > l4t_media_srv.cpp << 'EOF'
#include <atomic>
#include <cassert>
#include <chrono>
#include <cmath>
#include <condition_variable>
#include <cstdlib>
#include <cstring>
#include <cuda_runtime.h>
#include <fcntl.h>
#include <fstream>
#include <functional>
#include <iomanip>
#include <iostream>
#include <json/json.h>
#include <linux/videodev2.h>
#include <memory>
#include <mutex>
#include <npp.h>
#include <nppi.h>
#include <pthread.h>
#include <queue>
#include <random>
#include <sstream>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <string>
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <sys/poll.h>
#include <thread>
#include <time.h>
#include <unistd.h>
#include <vector>
#include "NvBufSurface.h"
#include "NvBuffer.h"
#include "NvUtils.h"
#include "NvVideoEncoder.h"
#include "nvbuf_utils.h"
#include "nvbufsurface.h"
#include "mk_mediakit.h"
// 定义相机配置结构体
struct CameraConfig {
std::string device;
int width;
int height;
};
// 定义车辆配置结构体
struct VehicleConfig {
std::map<std::string,CameraConfig> camera_configs;
};
// ============================ 常量定义============================
namespace VideoConstants {
constexpr auto PIXEL_FORMAT = V4L2_PIX_FMT_UYVY;
int IMG_BUFFER_COUNT = 2;
double DEFAULT_FPS = 15.0;
int FPS_CALCULATION_INTERVAL = 30;
bool USE_HEVC = false;
uint32_t MAX_BITRATE_MBPS = 2;
uint32_t ENCODER_BUFFER_COUNT = 1;
} // namespace VideoConstants
// ============================ 数据结构定义============================
/**
* @brief 矩形区域定义
*/
class Rect {
public:
int x, y, width, height;
Rect() = default;
Rect(int x, int y, int width, int height)
: x(x), y(y), width(width), height(height) {}
};
/**
* @brief 线程安全队列
*/
template <typename T> class ThreadSafeQueue {
private:
mutable std::mutex mutex_;
std::queue<T> queue_;
std::condition_variable cond_;
public:
ThreadSafeQueue() = default;
// 禁止拷贝
ThreadSafeQueue(const ThreadSafeQueue &) = delete;
ThreadSafeQueue &operator=(const ThreadSafeQueue &) = delete;
void push(T value) {
std::lock_guard<std::mutex> lock(mutex_);
queue_.push(std::move(value));
cond_.notify_one();
}
bool try_pop(T &value) {
std::lock_guard<std::mutex> lock(mutex_);
if (queue_.empty()) {
return false;
}
value = std::move(queue_.front());
queue_.pop();
return true;
}
bool empty() const {
std::lock_guard<std::mutex> lock(mutex_);
return queue_.empty();
}
size_t size() const {
std::lock_guard<std::mutex> lock(mutex_);
return queue_.size();
}
void clear() {
std::lock_guard<std::mutex> lock(mutex_);
std::queue<T> empty_queue;
std::swap(queue_, empty_queue);
}
};
/**
* @brief 视频缓冲区结构体
*/
struct VideoBuffer {
int in_dmabuf_fd = -1;
int out_dmabuf_fd = -1;
double timestamp = 0.0;
bool is_in_use = false;
};
/**
* @brief 线程间共享数据结构
*/
struct SharedVideoData {
int device_fd = -1;
std::vector<VideoBuffer> buffers;
std::atomic<bool> is_capturing{false};
std::atomic<int> latest_buffer_index{-1};
std::atomic<bool> frame_updated{false};
std::atomic<int> buffers_in_use_count{0};
std::mutex buffer_mutex;
};
/**
* @brief 视口配置结构体
*/
struct ViewportConfig {
std::string name;
Rect position;
};
/**
* @brief FPS统计结构体
*/
struct FpsStatistics {
unsigned int frame_count = 0;
std::chrono::steady_clock::time_point last_calc_time;
std::string name;
double current_fps = 0.0;
};
// ============================ 工具函数 ============================
namespace VideoUtils {
/**
* @brief 获取高精度当前时间(秒)
*/
inline double GetHighResolutionTime() {
struct timespec time_spec;
clock_gettime(CLOCK_MONOTONIC, &time_spec);
return static_cast<double>(time_spec.tv_sec) +
static_cast<double>(time_spec.tv_nsec) / 1e9;
}
/**
* @brief 打印像素格式信息
*/
inline void PrintPixelFormat(uint32_t pixel_format) {
std::printf("Pixel format: %c%c%c%c
", pixel_format & 0xFF,
(pixel_format >> 8) & 0xFF, (pixel_format >> 16) & 0xFF,
(pixel_format >> 24) & 0xFF);
}
/**
* @brief 获取当前时间字符串
*/
inline std::string GetCurrentTimeString() {
auto now = std::chrono::system_clock::now();
auto milliseconds = std::chrono::duration_cast<std::chrono::milliseconds>(
now.time_since_epoch()) %
1000;
auto timer = std::chrono::system_clock::to_time_t(now);
std::tm time_info = *std::localtime(&timer);
std::ostringstream output_stream;
output_stream << std::put_time(&time_info, "%Y-%m-%d %H:%M:%S");
output_stream << '.' << std::setfill('0') << std::setw(3)
<< milliseconds.count();
return output_stream.str();
}
/**
* @brief 计算并打印FPS信息
*/
void CalculateAndPrintFps(FpsStatistics &fps_stats, double latency = 0.0) {
auto current_time = std::chrono::steady_clock::now();
fps_stats.frame_count++;
auto elapsed_seconds = std::chrono::duration_cast<std::chrono::seconds>(
current_time - fps_stats.last_calc_time)
.count();
if (elapsed_seconds >= VideoConstants::FPS_CALCULATION_INTERVAL) {
fps_stats.current_fps =
static_cast<double>(fps_stats.frame_count) / elapsed_seconds;
std::cout << "[" << fps_stats.name << "] Current FPS: " << std::fixed
<< std::setprecision(2) << fps_stats.current_fps
<< " (frames: " << fps_stats.frame_count
<< ", time: " << elapsed_seconds << "s";
if (latency > 0) {
std::cout << ", latency: " << latency << "ms";
}
std::cout << ")" << std::endl;
// 重置计数器
fps_stats.frame_count = 0;
fps_stats.last_calc_time = current_time;
}
}
/**
* @brief 转储DMA缓冲区到文件
*/
int DumpDmaBuffer(const char *file_path, int plane_count, int dmabuf_fd) {
std::FILE *file = std::fopen(file_path, "wb");
if (!file) {
std::perror("Failed to open file for dumping");
return -1;
}
for (int plane = 0; plane < plane_count; ++plane) {
NvBufSurface *nvbuf_surf = nullptr;
int ret =
NvBufSurfaceFromFd(dmabuf_fd, reinterpret_cast<void **>(&nvbuf_surf));
if (ret != 0) {
std::fclose(file);
return -1;
}
ret = NvBufSurfaceMap(nvbuf_surf, 0, plane, NVBUF_MAP_READ_WRITE);
if (ret < 0) {
std::printf("%s NvBufSurfaceMap failed
", file_path);
std::fclose(file);
return ret;
}
NvBufSurfaceSyncForCpu(nvbuf_surf, 0, plane);
for (uint32_t i = 0; i < nvbuf_surf->surfaceList->planeParams.height[plane];
++i) {
std::fwrite(reinterpret_cast<char *>(
nvbuf_surf->surfaceList->mappedAddr.addr[plane]) +
i * nvbuf_surf->surfaceList->planeParams.pitch[plane],
nvbuf_surf->surfaceList->planeParams.width[plane] *
nvbuf_surf->surfaceList->planeParams.bytesPerPix[plane],
1, file);
}
ret = NvBufSurfaceUnMap(nvbuf_surf, 0, plane);
if (ret < 0) {
std::printf("%s NvBufSurfaceUnMap failed
", file_path);
std::fclose(file);
return ret;
}
}
std::fclose(file);
return 0;
}
} // namespace VideoUtils
// ============================ 错误检查宏 ============================
#define CHECK_ENCODER_API(call, expected_ret)
do {
int ret = (call);
if (ret != (expected_ret)) {
std::cerr << "编码器API调用失败: " << #call << std::endl;
std::cerr << " 文件: " << __FILE__ << " 行号: " << __LINE__
<< std::endl;
std::cerr << " 期望返回值: " << (expected_ret)
<< ", 实际返回值: " << ret << std::endl;
return false;
}
} while (0)
#define CHECK_CONDITION(condition, message)
do {
if (!(condition)) {
std::cerr << "条件检查失败: " << (message) << std::endl;
std::cerr << " 文件: " << __FILE__ << " 行号: " << __LINE__
<< std::endl;
std::cerr << " 条件: " << #condition << std::endl;
return false;
}
} while (0)
// ============================ 视频源类============================
class V4l2CameraSource {
private:
int frame_width_ = 0;
int frame_height_ = 0;
int dst_width_ = 0;
int dst_height_ = 0;
int camera_width_ = 0;
int camera_height_ = 0;
std::thread capture_thread_;
int device_fd_ = -1;
bool is_streaming_ = false;
SharedVideoData shared_data_;
FpsStatistics fps_stats_;
std::string device_filename_;
public:
V4l2CameraSource(const std::string &device_filename, int camera_width,
int camera_height)
: camera_width_(camera_width), camera_height_(camera_height),
device_filename_(device_filename) {
fps_stats_.name = device_filename_;
}
~V4l2CameraSource() { Stop(); }
// 禁止拷贝
V4l2CameraSource(const V4l2CameraSource &) = delete;
V4l2CameraSource &operator=(const V4l2CameraSource &) = delete;
bool Initialize(int dst_width, int dst_height) {
dst_width_ = dst_width;
dst_height_ = dst_height;
if (!OpenDevice())
return false;
if (!SetFormat())
return false;
if (!SetupBuffers())
return false;
if (!StartStreaming())
return false;
return true;
}
void Stop() {
// 停止采集线程
shared_data_.is_capturing = false;
if (capture_thread_.joinable()) {
capture_thread_.join();
}
// 清理资源
CleanupResources();
}
int GetLatestFrame(int *out_dmabuf_fd, double ×tamp) {
if (!shared_data_.frame_updated)
return -1;
int current_index = shared_data_.latest_buffer_index;
if (current_index < 0 ||
current_index >= static_cast<int>(shared_data_.buffers.size())) {
return -1;
}
shared_data_.frame_updated = false;
timestamp = shared_data_.buffers[current_index].timestamp;
*out_dmabuf_fd = shared_data_.buffers[current_index].out_dmabuf_fd;
return current_index;
}
bool isFrameReady() {
if (!shared_data_.frame_updated)
return false;
int current_index = shared_data_.latest_buffer_index;
if (current_index < 0 ||
current_index >= static_cast<int>(shared_data_.buffers.size())) {
return false;
}
return true;
}
bool ReleaseBuffer(int buffer_index) {
if (buffer_index < 0 ||
buffer_index >= static_cast<int>(shared_data_.buffers.size())) {
return false;
}
std::lock_guard<std::mutex> lock(shared_data_.buffer_mutex);
shared_data_.buffers[buffer_index].is_in_use = false;
shared_data_.buffers_in_use_count--;
return true;
}
int GetWidth() const { return frame_width_; }
int GetHeight() const { return frame_height_; }
private:
bool OpenDevice() {
device_fd_ = open(device_filename_.c_str(), O_RDWR | O_NONBLOCK);
if (device_fd_ < 0) {
std::printf("Failed to open device: %s
", device_filename_.c_str());
return false;
}
return true;
}
bool SetFormat() {
struct v4l2_format format = {};
format.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (ioctl(device_fd_, VIDIOC_G_FMT, &format) < 0) {
std::perror("Failed to get current format");
return false;
}
format.fmt.pix.width = camera_width_;
format.fmt.pix.height = camera_height_;
format.fmt.pix.pixelformat = VideoConstants::PIXEL_FORMAT;
format.fmt.pix.field = V4L2_FIELD_NONE;
if (ioctl(device_fd_, VIDIOC_S_FMT, &format) < 0) {
std::perror("Failed to set format");
VideoUtils::PrintPixelFormat(VideoConstants::PIXEL_FORMAT);
return false;
}
frame_width_ = format.fmt.pix.width;
frame_height_ = format.fmt.pix.height;
return true;
}
bool SetupBuffers() {
struct v4l2_requestbuffers buffer_request = {};
buffer_request.count = VideoConstants::IMG_BUFFER_COUNT;
buffer_request.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buffer_request.memory = V4L2_MEMORY_DMABUF;
if (ioctl(device_fd_, VIDIOC_REQBUFS, &buffer_request) < 0) {
std::perror("Failed to request buffers");
return false;
}
int actual_buffer_count = std::min((int)buffer_request.count,
(int)VideoConstants::IMG_BUFFER_COUNT);
shared_data_.buffers.resize(actual_buffer_count);
shared_data_.device_fd = device_fd_;
shared_data_.is_capturing = true;
std::vector<int> input_fds(actual_buffer_count),output_fds(actual_buffer_count);
// 分配输入缓冲区
NvBufSurf::NvCommonAllocateParams cam_params = {};
cam_params.memType = NVBUF_MEM_SURFACE_ARRAY;
cam_params.width = frame_width_;
cam_params.height = frame_height_;
cam_params.layout = NVBUF_LAYOUT_PITCH;
cam_params.colorFormat = NVBUF_COLOR_FORMAT_UYVY;
cam_params.memtag = NvBufSurfaceTag_CAMERA;
if (NvBufSurf::NvAllocate(&cam_params, actual_buffer_count,
input_fds.data())) {
return false;
}
// 分配输出缓冲区
NvBufSurf::NvCommonAllocateParams output_params = {};
output_params.memType = NVBUF_MEM_SURFACE_ARRAY;
output_params.width = dst_width_;
output_params.height = dst_height_;
output_params.layout = NVBUF_LAYOUT_PITCH;
output_params.colorFormat = NVBUF_COLOR_FORMAT_YUV420;
output_params.memtag = NvBufSurfaceTag_VIDEO_CONVERT;
if (NvBufSurf::NvAllocate(&output_params, actual_buffer_count,output_fds.data())) {
return false;
}
// 设置V4L2缓冲区
for (int i = 0; i < actual_buffer_count; ++i) {
struct v4l2_buffer v4l2_buf = {};
v4l2_buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_buf.memory = V4L2_MEMORY_DMABUF;
v4l2_buf.index = i;
v4l2_buf.m.fd = input_fds[i];
shared_data_.buffers[i].in_dmabuf_fd = input_fds[i];
shared_data_.buffers[i].out_dmabuf_fd = output_fds[i];
if (ioctl(device_fd_, VIDIOC_QBUF, &v4l2_buf) < 0) {
return false;
}
}
return true;
}
bool StartStreaming() {
enum v4l2_buf_type buffer_type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (ioctl(device_fd_, VIDIOC_STREAMON, &buffer_type) < 0) {
return false;
}
is_streaming_ = true;
capture_thread_ = std::thread(&V4l2CameraSource::CaptureThread, this);
return true;
}
void CleanupResources() {
if (is_streaming_ && device_fd_ >= 0) {
enum v4l2_buf_type buffer_type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl(device_fd_, VIDIOC_STREAMOFF, &buffer_type);
}
if (device_fd_ >= 0) {
close(device_fd_);
device_fd_ = -1;
}
}
void TransformFrame(int in_dmabuf_fd, int out_dmabuf_fd) {
NvBufSurf::NvCommonTransformParams transform_params = {};
transform_params.src_top = 0;
transform_params.src_left = 0;
transform_params.src_width = frame_width_;
transform_params.src_height = frame_height_;
transform_params.dst_top = 0;
transform_params.dst_left = 0;
transform_params.dst_width = dst_width_;
transform_params.dst_height = dst_height_;
transform_params.flag = static_cast<NvBufSurfTransform_Transform_Flag>(
NVBUFSURF_TRANSFORM_FILTER | NVBUFSURF_TRANSFORM_FLIP);
transform_params.flip = NvBufSurfTransform_None;
transform_params.filter = NvBufSurfTransformInter_Bilinear;
int ret =
NvBufSurf::NvTransform(&transform_params, in_dmabuf_fd, out_dmabuf_fd);
if (ret) {
std::cerr << "Error in frame transformation." << std::endl;
}
}
void CaptureThread() {
SharedVideoData &data = shared_data_;
struct pollfd poll_fd = {.fd = data.device_fd, .events = POLLIN};
fps_stats_.last_calc_time = std::chrono::steady_clock::now();
while (data.is_capturing) {
int poll_result = poll(&poll_fd, 1, 3);
if (poll_result < 0) {
std::perror("Poll failed");
break;
} else if (poll_result == 0) {
continue;
}
struct v4l2_buffer v4l2_buf = {};
v4l2_buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_buf.memory = V4L2_MEMORY_DMABUF;
if (ioctl(data.device_fd, VIDIOC_DQBUF, &v4l2_buf) < 0) {
std::perror("Dequeue buffer failed");
continue;
}
auto input_ts = VideoUtils::GetHighResolutionTime();
int buffer_index = v4l2_buf.index;
if (buffer_index < 0 ||
buffer_index >= static_cast<int>(data.buffers.size())) {
std::printf("Invalid buffer index: %d
", buffer_index);
continue;
}
double latency = 0.0;
{
std::lock_guard<std::mutex> lock(data.buffer_mutex);
if (data.buffers_in_use_count == 0 &&
!data.buffers[buffer_index].is_in_use) {
data.latest_buffer_index = buffer_index;
data.frame_updated = true;
data.buffers[buffer_index].is_in_use = true;
data.buffers_in_use_count++;
TransformFrame(shared_data_.buffers[buffer_index].in_dmabuf_fd,
shared_data_.buffers[buffer_index].out_dmabuf_fd);
auto now = VideoUtils::GetHighResolutionTime();
latency = (now - input_ts) * 1000.0;
data.buffers[buffer_index].timestamp = now;
}
}
if (latency > 0) {
VideoUtils::CalculateAndPrintFps(fps_stats_, latency);
}
if (ioctl(data.device_fd, VIDIOC_QBUF, &v4l2_buf) < 0) {
std::perror("Re-queue buffer failed");
break;
}
}
}
};
/**
* 编码数据回调函数类型定义
* @param encoded_data 编码后的数据
* @param data_size 数据大小
* @param is_key_frame 是否为关键帧
* @param user_data 用户自定义数据
*/
using EncodedDataCallback =
std::function<void(const uint8_t *encoded_data, size_t data_size,
bool is_key_frame, void *user_data)>;
/**
* H265视频编码器类
* 封装NVIDIA硬件编码器功能,支持YUV420到H265的转换
*/
class HwVideoEncoder {
private:
// 编码状态控制
std::atomic<bool> is_encoding_done_;
std::atomic<bool> has_error_;
// 编码器核心组件
NvVideoEncoder *video_encoder_ = nullptr;
// 编码器核心组件
uint32_t frame_width_;
uint32_t frame_height_;
uint32_t frame_size_; // YUV420帧大小
bool is_initialized_;
bool is_flushing_;
// 帧计数器
uint32_t sent_frame_count_;
uint32_t received_frame_count_;
// 编码参数
uint32_t frame_rate_ = 0;
uint32_t idr_interval_ = 0;
uint32_t bitrate_ = 0;
uint32_t peak_bitrate_ = 0;
// 缓冲区管理
uint32_t output_plane_buffer_index_;
bool capture_plane_eos_received_;
// 回调函数
EncodedDataCallback data_callback_ = nullptr;
void *callback_user_data_;
// 回调函数
static constexpr uint32_t ENCODER_BUFFER_COUNT = 1;
static constexpr uint32_t MAX_BITRATE_MBPS = 2;
public:
/**
* 构造函数
* @param width 视频宽度
* @param height 视频高度
* @param frame_rate 帧率,默认15fps
* @param bitrate 码率(bps),默认1Mbps
* @param idr_interval IDR帧间隔,默认30帧
*/
HwVideoEncoder(uint32_t width, uint32_t height, uint32_t frame_rate = 15,
uint32_t bitrate = 1 * 1024 * 1024, uint32_t idr_interval = 30)
: frame_width_(width), frame_height_(height), frame_rate_(frame_rate),
idr_interval_(idr_interval), bitrate_(bitrate),
peak_bitrate_(bitrate * 2), video_encoder_(nullptr),
is_encoding_done_(false), has_error_(false), is_initialized_(false),
is_flushing_(false), sent_frame_count_(0), received_frame_count_(0),
output_plane_buffer_index_(0), capture_plane_eos_received_(false),
callback_user_data_(nullptr) {
frame_size_ = width * height * 3 / 2;
}
// 禁止拷贝和赋值
HwVideoEncoder(const HwVideoEncoder &) = delete;
HwVideoEncoder &operator=(const HwVideoEncoder &) = delete;
~HwVideoEncoder() { cleanup(); }
/**
* 设置编码数据回调函数
* @param callback 回调函数
* @param user_data 用户自定义数据
*/
void setEncodedDataCallback(EncodedDataCallback callback,
void *user_data = nullptr) {
data_callback_ = callback;
callback_user_data_ = user_data;
}
/**
* 动态设置IDR帧间隔
* @param interval IDR帧间隔(帧数)
* @return 设置成功返回true
*/
bool setIdrInterval(uint32_t interval) {
if (!video_encoder_ || !is_initialized_) {
std::cerr << "编码器未初始化,无法设置IDR间隔" << std::endl;
return false;
}
idr_interval_ = interval;
int ret = video_encoder_->setIDRInterval(interval);
if (ret != 0) {
std::cerr << "设置IDR间隔失败: " << ret << std::endl;
return false;
}
return true;
}
/**
* 动态设置码率
* @param bitrate 码率(bps)
* @param peak_bitrate 峰值码率(bps),为0时使用bitrate*2
* @return 设置成功返回true
*/
bool setBitrate(uint32_t bitrate, uint32_t peak_bitrate = 0) {
if (!video_encoder_ || !is_initialized_) {
std::cerr << "编码器未初始化,无法设置码率" << std::endl;
return false;
}
bitrate_ = bitrate;
peak_bitrate_ = (peak_bitrate > 0) ? peak_bitrate : bitrate * 2;
int ret = video_encoder_->setBitrate(bitrate_);
if (ret != 0) {
std::cerr << "设置码率失败: " << ret << std::endl;
return false;
}
return true;
}
/**
* 强制插入IDR帧
* @return 成功返回true
*/
bool forceIdrFrame() {
if (!video_encoder_ || !is_initialized_) {
std::cerr << "编码器未初始化,无法强制IDR帧" << std::endl;
return false;
}
int ret = video_encoder_->forceIDR();
if (ret != 0) {
std::cerr << "强制IDR帧失败: " << ret << std::endl;
return false;
}
return true;
}
/**
* 获取当前编码统计信息
*/
void getStats(uint32_t &sent_frames, uint32_t &received_frames) const {
sent_frames = sent_frame_count_;
received_frames = received_frame_count_;
}
/**
* 获取编码器状态
*/
bool isEncoding() const { return !is_encoding_done_ && !has_error_; }
bool hasError() const { return has_error_; }
/**
* 清理所有资源,防止内存泄漏
*/
void cleanup() {
std::cout << "清理编码器资源..." << std::endl;
if (video_encoder_ && is_initialized_) {
try {
video_encoder_->capture_plane.stopDQThread();
video_encoder_->output_plane.setStreamStatus(false);
video_encoder_->capture_plane.setStreamStatus(false);
delete video_encoder_;
} catch (const std::exception &e) {
std::cerr << "清理编码器时发生异常: " << e.what() << std::endl;
}
video_encoder_ = nullptr;
}
is_initialized_ = false;
}
/**
* 初始化编码器
* @return 初始化成功返回true,失败返回false
*/
bool initialize() {
int encoder_pixfmt =
VideoConstants::USE_HEVC ? V4L2_PIX_FMT_H265 : V4L2_PIX_FMT_H264;
try {
video_encoder_ = NvVideoEncoder::createVideoEncoder("enc0");
if (!video_encoder_)
return false;
} catch (...) {
return false;
}
if (video_encoder_->setCapturePlaneFormat(
encoder_pixfmt, frame_width_, frame_height_,
MAX_BITRATE_MBPS * 1024 * 1024) < 0 ||
video_encoder_->setOutputPlaneFormat(V4L2_PIX_FMT_YUV420M, frame_width_,
frame_height_) < 0) {
return false;
}
// 简化配置过程
if (VideoConstants::USE_HEVC) {
video_encoder_->setProfile(V4L2_MPEG_VIDEO_H265_PROFILE_MAIN10);
} else {
video_encoder_->setProfile(V4L2_MPEG_VIDEO_H264_PROFILE_HIGH);
}
video_encoder_->setBitrate(bitrate_);
video_encoder_->setRateControlMode(V4L2_MPEG_VIDEO_BITRATE_MODE_CBR);
video_encoder_->setIDRInterval(idr_interval_);
video_encoder_->setHWPresetType(V4L2_ENC_HW_PRESET_ULTRAFAST);
video_encoder_->setMaxPerfMode(true);
CHECK_ENCODER_API(video_encoder_->setNumBFrames(0), 0);
CHECK_ENCODER_API(video_encoder_->setNumReferenceFrames(0), 0);
// CHECK_ENCODER_API(video_encoder_->setIFrameInterval(idr_interval_/2), 0);
// 设置编码参数
if (video_encoder_->output_plane.reqbufs(
V4L2_MEMORY_DMABUF, VideoConstants::ENCODER_BUFFER_COUNT) ||
video_encoder_->capture_plane.setupPlane(
V4L2_MEMORY_MMAP, VideoConstants::ENCODER_BUFFER_COUNT, true,
false) < 0) {
return false;
}
video_encoder_->capture_plane.setDQThreadCallback(capturePlaneDqCallback);
if (video_encoder_->capture_plane.startDQThread(this) < 0) {
return false;
}
video_encoder_->output_plane.setStreamStatus(true);
video_encoder_->capture_plane.setStreamStatus(true);
for (uint32_t i = 0; i < video_encoder_->capture_plane.getNumBuffers(); i++) {
struct v4l2_buffer v4l2_buf;
struct v4l2_plane planes[MAX_PLANES];
memset(&v4l2_buf, 0, sizeof(v4l2_buf));
memset(planes, 0, MAX_PLANES * sizeof(struct v4l2_plane));
v4l2_buf.index = i;
v4l2_buf.m.planes = planes;
int ret = video_encoder_->capture_plane.qBuffer(v4l2_buf, NULL);
if (ret < 0) {
std::cerr << "Error while queueing buffer at capture plane" << std::endl;
return false;
}
}
is_initialized_ = true;
return true;
}
int getOutputBufferSize() {
return video_encoder_->output_plane.getNumBuffers();
}
bool setupOutputBuffer(int index, int output_plane_fd) {
if (!video_encoder_)
return false;
struct v4l2_buffer v4l2_buf = {};
struct v4l2_plane planes[MAX_PLANES] = {};
NvBuffer *buffer = video_encoder_->output_plane.getNthBuffer(index);
v4l2_buf.index = index;
v4l2_buf.m.planes = planes;
v4l2_buf.type = V4L2_BUF_TYPE_VIDEO_OUTPUT_MPLANE;
v4l2_buf.memory = V4L2_MEMORY_DMABUF;
if (video_encoder_->output_plane.mapOutputBuffers(v4l2_buf,
output_plane_fd) < 0) {
return false;
}
for (uint32_t j = 0; j < buffer->n_planes; j++) {
v4l2_buf.m.planes[j].bytesused =
buffer->planes[j].fmt.stride * buffer->planes[j].fmt.height;
}
return video_encoder_->output_plane.qBuffer(v4l2_buf, nullptr) >= 0;
}
int deQueue(struct v4l2_buffer &v4l2_buf) {
NvBuffer *buffer;
if (video_encoder_->output_plane.dqBuffer(v4l2_buf, &buffer, NULL, 10) <
0) {
std::cerr << "ERROR while DQing buffer at output plane" << std::endl;
return -1;
}
for (uint32_t j = 0; j < buffer->n_planes; j++) {
v4l2_buf.m.planes[j].bytesused =
buffer->planes[j].fmt.stride * buffer->planes[j].fmt.height;
}
return v4l2_buf.index;
}
bool queueDirect(struct v4l2_buffer &v4l2_buf) {
return video_encoder_->output_plane.qBuffer(v4l2_buf, nullptr) >= 0;
}
private:
/**
* 设置流结束标志
*/
void setupEndOfStream(struct v4l2_buffer &v4l2_buf) {
is_flushing_ = true;
v4l2_buf.m.planes[0].m.userptr = 0;
v4l2_buf.m.planes[0].bytesused = 0;
v4l2_buf.m.planes[1].bytesused = 0;
v4l2_buf.m.planes[2].bytesused = 0;
}
/**
* 停止编码过程
*/
void stopEncoding() {
is_encoding_done_ = true;
if (video_encoder_ && is_initialized_) {
video_encoder_->capture_plane.stopDQThread();
video_encoder_->capture_plane.waitForDQThread(1000);
}
}
/**
* 捕获平面DQ线程回调函数(静态)
* 处理编码完成的帧数据
*/
static bool capturePlaneDqCallback(struct v4l2_buffer *v4l2_buf,
NvBuffer *buffer, NvBuffer *shared_buffer,
void *user_data) {
// 参数验证
if (!v4l2_buf || !user_data || !buffer || !user_data) {
std::cerr << "capturePlaneDqCallback invalid" << std::endl;
return false;
}
HwVideoEncoder *encoder_instance = static_cast<HwVideoEncoder *>(user_data);
return encoder_instance->processEncodedFrame(v4l2_buf, buffer);
}
/**
* 处理编码完成的帧(成员函数)
*/
bool processEncodedFrame(struct v4l2_buffer *v4l2_buf, NvBuffer *buffer) {
if (buffer->planes[0].bytesused == 0)
return false;
// 获取编码元数据
v4l2_ctrl_videoenc_outputbuf_metadata enc_metadata;
bool is_key_frame =
(video_encoder_->getMetadata(v4l2_buf->index, enc_metadata) == 0)
? enc_metadata.KeyFrame
: false;
received_frame_count_++;
// 通过回调输出编码数据
if (data_callback_) {
for (uint32_t plane_index = 0; plane_index < buffer->n_planes;
plane_index++) {
if (buffer->planes[plane_index].bytesused > 0) {
data_callback_(reinterpret_cast<const uint8_t *>(
buffer->planes[plane_index].data),
buffer->planes[plane_index].bytesused, is_key_frame,
callback_user_data_);
}
}
}
return video_encoder_->capture_plane.qBuffer(*v4l2_buf, nullptr) >= 0;
}
};
class FrameRateController {
private:
std::chrono::steady_clock::time_point next_frame_time_;
std::chrono::microseconds frame_interval_;
public:
FrameRateController(double fps)
: frame_interval_(static_cast<int64_t>(1000000.0 / fps)) {
next_frame_time_ = std::chrono::steady_clock::now();
}
void waitNextFrame() {
next_frame_time_ += frame_interval_;
std::this_thread::sleep_until(next_frame_time_);
}
};
// 帧同步
bool waitForAllCamerasReady(
std::vector<std::unique_ptr<V4l2CameraSource>> &video_sources,
int timeout_ms = 33) {
auto start_time = std::chrono::steady_clock::now();
while (std::chrono::duration_cast<std::chrono::milliseconds>(
std::chrono::steady_clock::now() - start_time)
.count() < timeout_ms) {
bool all_ready = true;
for (auto &source : video_sources) {
if (!source->isFrameReady()) {
all_ready = false;
break;
}
}
if (all_ready)
return true;
std::this_thread::sleep_for(std::chrono::milliseconds(1));
}
return false;
}
struct MultiCameraStreamer {
mk_media media = nullptr;
int dts = 0;
HwVideoEncoder *m_encoder;
float total_encode_size = 0;
double last_ts=0;
std::map<std::string, VehicleConfig> vehicles;
std::vector<ViewportConfig> viewport_configs;
std::vector<std::unique_ptr<V4l2CameraSource>> video_sources;
const int output_width = 1920;
const int output_height = 1080;
std::vector<int> fds;
int output_buffer_size;
NvBufSurfTransformCompositeBlendParamsEx composite_params;
FpsStatistics main_fps_stats = {0};
static void rtspWriteCallback(const uint8_t *encoded_data, size_t data_size,
bool is_key_frame, void *user_data) {
MultiCameraStreamer *obj = (MultiCameraStreamer *)(user_data);
double now = VideoUtils::GetHighResolutionTime();
obj->total_encode_size += data_size;
float duration = now - obj->last_ts;
if (is_key_frame && duration > VideoConstants::FPS_CALCULATION_INTERVAL) {
float real_bitrate=obj->total_encode_size * 8 / duration / 1024;
printf("Real bitrate:%.3f(Kbit/s) Keyframe:%ld(KB)
",
real_bitrate,data_size / 1024);
obj->last_ts = now;
obj->total_encode_size = 0;
}
mk_frame frame = mk_frame_create(
VideoConstants::USE_HEVC ? MKCodecH265 : MKCodecH264, obj->dts,
obj->dts, (const char *)encoded_data, data_size, NULL, NULL);
obj->dts += (1000 / VideoConstants::DEFAULT_FPS);
mk_media_input_frame(obj->media, frame);
mk_frame_unref(frame);
}
bool Open(std::string device_type) {
main_fps_stats.last_calc_time = std::chrono::steady_clock::now();
main_fps_stats.name = "multi_view";
const char *jsonConfigFile = "camera_cfg.json";
std::ifstream configFile(jsonConfigFile);
if (!configFile.is_open()) {
printf("Failed to open JSON config file: %s
", jsonConfigFile);
return false;
}
Json::Value root;
Json::Reader reader;
if (!reader.parse(configFile, root)) {
printf("Failed to parse JSON config file:
");
return false;
}
for (auto name : root.getMemberNames()) {
if(name=="global")
{
Json::Value value = root[name];
VideoConstants::IMG_BUFFER_COUNT = value["camera_bufers"].asInt();
VideoConstants::ENCODER_BUFFER_COUNT = value["encoder_buffers"].asInt();
VideoConstants::USE_HEVC = value["use_hevc"].asBool();
VideoConstants::DEFAULT_FPS = value["fps"].asInt();
VideoConstants::MAX_BITRATE_MBPS = value["max_bitrate_mps"].asInt();
VideoConstants::FPS_CALCULATION_INTERVAL = value["print_interval_sec"].asInt();
}
else if(name=="layout")
{
Json::Value value = root[name];
int i=0;
for (auto cam_name : value.getMemberNames())
{
viewport_configs.push_back({cam_name,
Rect(value[cam_name]["x"].asInt(),
value[cam_name]["y"].asInt(),
value[cam_name]["width"].asInt(),
value[cam_name]["height"].asInt())});
i+=1;
}
}
else
{
Json::Value vehicle_node = root[name];
VehicleConfig config;
for (auto cam_name : vehicle_node.getMemberNames())
{
config.camera_configs[cam_name].device = vehicle_node[cam_name]["dev"].asString();
config.camera_configs[cam_name].width = vehicle_node[cam_name]["width"].asInt();
config.camera_configs[cam_name].height = vehicle_node[cam_name]["height"].asInt();
}
vehicles[name] = config;
}
}
if (vehicles.find(device_type) == vehicles.end()) {
printf("cant find:%s
", device_type.c_str());
return false;
}
VehicleConfig &config = vehicles[device_type];
std::vector<std::string> camera_names={"left_front","left_rear","rear","right_rear","right_front","front"};
for(auto name:camera_names)
{
video_sources.push_back(std::make_unique<V4l2CameraSource>(
config.camera_configs[name].device, config.camera_configs[name].width,
config.camera_configs[name].height));
}
int viewport_size = viewport_configs.size();
for (int i = 0; i < viewport_size; i++) {
auto position = viewport_configs[i].position;
video_sources[i]->Initialize(position.width, position.height);
}
codec_args v_args = {0};
media = mk_media_create("__defaultVhost__", "live", "multi_view", 0, 0, 0);
auto v_track = mk_track_create(VideoConstants::USE_HEVC ? MKCodecH265 : MKCodecH264, &v_args);
mk_media_init_track(media, v_track);
mk_media_init_complete(media);
m_encoder = new HwVideoEncoder(output_width, output_height,
VideoConstants::DEFAULT_FPS, 2024 * 1024,VideoConstants::DEFAULT_FPS);
m_encoder->setEncodedDataCallback(rtspWriteCallback, this);
if (!m_encoder->initialize()) {
std::cerr << "m_encoder->initialize error" << std::endl;
return false;
}
output_buffer_size = m_encoder->getOutputBufferSize();
fds.resize(output_buffer_size);
NvBufSurf::NvCommonAllocateParams camparams_420p = {0};
camparams_420p.memType = NVBUF_MEM_SURFACE_ARRAY;
camparams_420p.width = output_width;
camparams_420p.height = output_height;
camparams_420p.layout = NVBUF_LAYOUT_PITCH;
camparams_420p.colorFormat = NVBUF_COLOR_FORMAT_YUV420;
camparams_420p.memtag = NvBufSurfaceTag_VIDEO_ENC;
if (NvBufSurf::NvAllocate(&camparams_420p, output_buffer_size,fds.data())) {
perror("Failed to create fd_420p NvBuffer");
return false;
}
for (int i = 0; i < output_buffer_size; i++) {
if (!m_encoder->setupOutputBuffer(i, fds[i])) {
std::cerr << "帧编码失败: " << std::endl;
return false;
}
}
memset(&composite_params, 0, sizeof(composite_params));
composite_params.params.composite_blend_flag =NVBUFSURF_TRANSFORM_COMPOSITE;
composite_params.dst_comp_rect = static_cast<NvBufSurfTransformRect *>(malloc(sizeof(NvBufSurfTransformRect) * 6));
composite_params.src_comp_rect = static_cast<NvBufSurfTransformRect *>(malloc(sizeof(NvBufSurfTransformRect) * 6));
composite_params.params.composite_blend_filter =NvBufSurfTransformInter_Algo3;
for (size_t i = 0; i < video_sources.size(); i++) {
auto position = viewport_configs[i].position;
composite_params.src_comp_rect[i].left = 0;
composite_params.src_comp_rect[i].top = 0;
composite_params.src_comp_rect[i].width =position.width;
composite_params.src_comp_rect[i].height =position.height;
composite_params.dst_comp_rect[i].left = position.x;
composite_params.dst_comp_rect[i].top = position.y;
composite_params.dst_comp_rect[i].width =position.width;
composite_params.dst_comp_rect[i].height =position.height;
}
return true;
}
bool Run() {
FrameRateController fps_controller(VideoConstants::DEFAULT_FPS);
struct v4l2_buffer v4l2_buf;
struct v4l2_plane planes[MAX_PLANES];
while (1) {
fps_controller.waitNextFrame();
waitForAllCamerasReady(video_sources);
memset(&v4l2_buf, 0, sizeof(v4l2_buf));
memset(planes, 0, sizeof(planes));
v4l2_buf.m.planes = planes;
int output_plane_index = m_encoder->deQueue(v4l2_buf);
if (output_plane_index < 0) {
printf("deQueue error
");
continue;
}
std::vector<int> buffer_index_arr;
std::vector<int> index_arr;
std::vector<NvBufSurface *> batch_surf;
NvBufSurface *pdstSurf;
int ret =NvBufSurfaceFromFd(fds[output_plane_index], (void **)(&pdstSurf));
if (ret != 0) {
printf("NvBufSurfaceFromFd error:%d
",ret);
return -1;
}
double camera_ts;
bool flag=true;
for (int i = 0; i < video_sources.size(); i++) {
int out_dmabuf_fd;
int buffer_index =video_sources[i]->GetLatestFrame(&out_dmabuf_fd, camera_ts);
if (buffer_index <0 ) {
printf("%d GetLatestFrame error:%d
",i,buffer_index);
flag=false;
break;
}
NvBufSurface *nvbuf_surf = 0;
int ret = NvBufSurfaceFromFd(out_dmabuf_fd, (void **)(&nvbuf_surf));
if (ret != 0) {
printf("NvBufSurfaceFromFd error:%d
",ret);
flag=false;
break;
}
buffer_index_arr.push_back(buffer_index);
index_arr.push_back(i);
batch_surf.push_back(nvbuf_surf);
}
if(flag)
{
composite_params.params.input_buf_count = buffer_index_arr.size();
ret = NvBufSurfTransformMultiInputBufCompositeBlend(batch_surf.data(), pdstSurf, &composite_params);
if (ret) {
std::cerr << "111 Error in NvBufferComposite:" << ret << std::endl;
return -1;
}
}
for (int i = 0; i < buffer_index_arr.size(); i++) {
video_sources[index_arr[i]]->ReleaseBuffer(buffer_index_arr[i]);
}
if (m_encoder->isEncoding()) {
if (!m_encoder->queueDirect(v4l2_buf)) {
std::cerr << "queueDirect err: " << std::endl;
break;
}
}
auto t1 = VideoUtils::GetHighResolutionTime();
VideoUtils::CalculateAndPrintFps(main_fps_stats, (t1 - camera_ts) * 1000);
}
return true;
}
};
MultiCameraStreamer *inst = nullptr;
void API_CALL on_mk_media_play(const mk_media_info url_info,
const mk_auth_invoker invoker,
const mk_sock_info sender) {
if (!inst) {
return;
}
std::string stream_name = mk_media_info_get_stream(url_info);
std::string stream_params = mk_media_info_get_params(url_info);
printf("on_mk_media_play:%s [%s]
", stream_name.c_str(),stream_params.c_str());
// 解析bitrate参数
int bitrate = 0;
size_t bitrate_pos = stream_params.find("bitrate=");
if (bitrate_pos != std::string::npos) {
size_t value_start = bitrate_pos + 8; // "bitrate=" 长度是8
size_t value_end = stream_params.find('&', value_start);
std::string bitrate_str;
if (value_end == std::string::npos) {
bitrate_str = stream_params.substr(value_start);
} else {
bitrate_str = stream_params.substr(value_start, value_end - value_start);
}
try {
bitrate = std::stoi(bitrate_str);
printf("bitrate: %d
", bitrate);
} catch (const std::exception &e) {
printf("bitrate参数解析失败: %s
", e.what());
return;
}
}
// 如果解析到有效的bitrate值,则设置比特率
if (bitrate > 0) {
inst->m_encoder->setBitrate(bitrate * 1024);
}
inst->m_encoder->forceIdrFrame();
mk_auth_invoker_do(invoker, NULL);
}
int main(int argc, char *argv[]) {
printf("BuildTime:%s %s
", __DATE__, __TIME__);
if (argc != 2) {
printf("Usage:%s device_type[W3,W7,67])
", argv[0]);
return -1;
}
mk_config config = {
.thread_num = 4,
.log_level = 0,
.log_mask = LOG_CONSOLE,
.log_file_path = NULL,
.log_file_days = 0,
.ini_is_path = 1,
.ini = "mk_mediakit.ini",
.ssl_is_path = 1,
.ssl = NULL,
.ssl_pwd = NULL,
};
mk_env_init(&config);
mk_rtsp_server_start(8554, 0);
mk_events events = {.on_mk_media_changed = NULL,
.on_mk_media_publish = NULL,
.on_mk_media_play = on_mk_media_play,
.on_mk_media_not_found = NULL,
.on_mk_media_no_reader = NULL,
.on_mk_http_request = NULL,
.on_mk_http_access = NULL,
.on_mk_http_before_access = NULL,
.on_mk_rtsp_get_realm = NULL,
.on_mk_rtsp_auth = NULL,
.on_mk_record_mp4 = NULL,
.on_mk_shell_login = NULL,
.on_mk_flow_report = NULL};
mk_events_listen(&events);
inst = new MultiCameraStreamer();
if(inst->Open(argv[1]))
{
inst->Run();
}
return 0;
}
EOF
2、生成主程序配置文件
cat > camera_cfg.json <<'EOF'
{
"global":{
"camera_bufers":2,
"encoder_buffers":2,
"use_hevc":false,
"fps":15,
"max_bitrate_mps":2,
"print_interval_sec":30
},
"layout":{
"left_front": {"x":0, "y":190, "width":432, "height":274},
"left_rear": {"x":0, "y":648, "width":584, "height":402},
"rear": {"x":668, "y":648, "width":584, "height":402},
"right_rear": {"x":1330, "y":648, "width":584, "height":402},
"right_front": {"x":1488, "y":190, "width":432, "height":274},
"front": {"x":444, "y":22, "width":1034, "height":612}
},
"DEV":{
"left_front": {"dev":"/dev/video1","width":1920,"height":1080},
"left_rear": {"dev":"/dev/video4","width":1920,"height":1080},
"rear": {"dev":"/dev/video3","width":1920,"height":1080},
"right_rear": {"dev":"/dev/video2","width":1920,"height":1080},
"right_front":{"dev":"/dev/video0","width":1920,"height":1080},
"front": {"dev":"/dev/video7","width":1920,"height":1080}
}
}
EOF
3、生成RTSP服务器配置文件
cat > mk_mediakit.ini <<'EOF'
[general]
mergeWriteMS=0
enableVhost=0
[protocol]
enable_audio=0
enable_hls=0
enable_hls_fmp4=0
enable_mp4=0
enable_rtmp=0
enable_ts=0
enable_fmp4=0
[rtp_proxy]
lowLatency=1
gop_cache=1
[rtp]
lowLatency=1
tcp_send_buffer_size = 0
max_rtp_check_delay_ms = 500
h264_stap_a=1
videoMtuSize=1400
[rtsp]
directProxy=0
lowLatency=1
tcp_send_buffer_size = 0
max_rtp_check_delay_ms = 500
EOF
4、编译
g++ -o l4t_media_srv l4t_media_srv.cpp
-std=c++17 -I ../3rdparty/include
-I/usr/src/jetson_multimedia_api/include
-I /usr/local/cuda/include -I /usr/include/jsoncpp -I /opt/apollo/neo/include
/usr/src/jetson_multimedia_api/samples/common/classes/NvVideoEncoder.cpp
/usr/src/jetson_multimedia_api/samples/common/classes/NvLogging.cpp
/usr/src/jetson_multimedia_api/samples/common/classes/NvV4l2Element*.cpp
/usr/src/jetson_multimedia_api/samples/common/classes/NvElement*.cpp
/usr/src/jetson_multimedia_api/samples/common/classes/NvBufSurface.cpp
/usr/src/jetson_multimedia_api/samples/common/classes/NvBuffer.cpp
-L /usr/local/cuda/lib64 -L/usr/lib/aarch64-linux-gnu/tegra -L ../3rdparty/lib
-lcudart -lv4l2 -lpthread -lnvbufsurface -lnvbufsurftransform -lnvv4l2 -lmk_api -ljsoncpp
-Wl,-rpath=../3rdparty/lib
5、运行
./l4t_media_srv DEV
















暂无评论内容