
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。
老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:
做到欲望极简,了解自己的真实欲望,不受外在潮流的影响,不盲从,不跟风。把自己的精力全部用在自己。一是去掉多余,凡事找规律,基础是诚信;二是系统思考、大胆设计、小心求证;三是“一张纸制度”,也就是无论多么复杂的工作内容,要在一张纸上描述清楚;四是要坚决反对虎头蛇尾,反对繁文缛节,反对老好人主义。
一直很喜欢发小老李QQ签名那句话—生活如逆水行舟,不进则退。农村做题家出来的汉子,我可能已经不具备享受快乐的权力,只有做个躬行的卒子,一步一个脚印往前走。
中年男人尽量避免陷入历史虚无主义,自己无需问“人活着为了什么?”,做自己该做之事,七八月只管播种,到了十一二月收获季节,自有收获。

首先结论就是计算芯片是算力时代下智能网联汽车的核心。这也是国内众多车企开始自研芯片的核心原因,要让芯片与自家车功能匹配度最高,并且也不受芯片供应商制约。
一、车规芯片基础信息
随着汽车电子电气(EE)架构向集中化、域控制器化革新,汽车半导体产业迎来高速发展期。按功能维度划分,汽车半导体主要涵盖汽车芯片与功率半导体两大品类,其中计算芯片作为汽车芯片的核心构成,是支撑车辆智能化功能的“算力基座”,按集成规模与功能定位的差异,可细分为MCU芯片与SoC芯片两大类型。
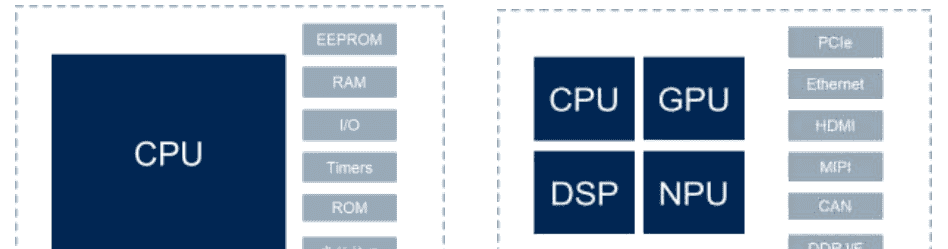
-> MCU(Micro Control Unit,微控制器)是芯片级的控制核心,其本质是将计算机的核心组件高度集成于单芯片:包含负责逻辑运算的CPU、用于临时数据存储的RAM、用于固化程序的ROM、定时计数器及多种I/O接口(如CAN、UART)。这种“一体化集成”设计使其具备体积小、功耗低、成本可控的特点,主要承担车辆中低算力需求的控制任务,如车窗升降、灯光调节、空调控制等车身电子功能,是传统汽车电子系统中的基础芯片。
->而SoC(System on Chip,片上系统)则属于系统级的计算平台,与MCU的“芯片级集成”存在本质差异:它不仅集成了RAM、ROM等基础存储单元,更搭载了高性能CPU核心集群、专用AI加速模块(如GPU、ASIC)、高速接口控制器等复杂组件,具备运行嵌入式操作系统(如QNX、Linux)的能力。SoC的核心优势在于“算力密度高、功能集成度强”,能够同时处理多源传感器数据、运行复杂算法模型,是支撑自动驾驶、智能座舱等高阶智能化功能的核心硬件。
当前,智能化趋势正驱动汽车计算芯片从MCU向SoC加速过渡。传统MCU芯片仅能提供简单的逻辑计算能力,单一芯片对应单一功能的模式,已无法满足自动驾驶对“多传感器融合、实时决策、复杂控制”的算力需求——例如L2+级自动驾驶需同时处理摄像头、毫米波雷达、激光雷达的多源数据,单颗MCU的算力(通常为几至几十MIPS)远不能支撑算法运行。而新的集中式EE架构(如域控制器架构、中央计算架构),则要求芯片具备“硬件资源虚拟化、功能模块化”的特性,能够将多个功能模块集成于单一芯片平台,这一需求恰好与SoC的系统级集成优势高度契合。因此,从MCU到SoC的技术迭代,不仅是芯片集成规模的升级,更是汽车从“机械控制”向“智能决策”转型的必然选择。
二、MCU和SOC细节
1、传统 MCU
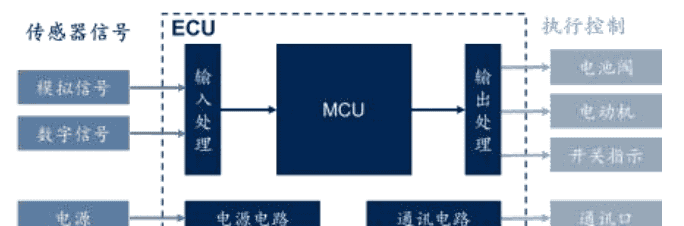
MCU(Micro Control Unit,微控制器)是芯片级的控制核心,更是汽车ECU的“运算大脑”。ECU(Electronic Control Unit,电子控制单元)作为汽车EE架构的基本功能单位,每个ECU对应车辆的一项或一组特定功能(如发动机控制、车身电子控制等),而MCU芯片便嵌入其中承担核心运算任务。其工作流程呈现完整的“信号输入-运算处理-指令输出”闭环:当传感器采集到车辆状态或环境信号后,输入处理器先对信号进行模数转换、滤波放大等预处理,随后传递给MCU进行逻辑运算与决策;运算完成后,输出处理器将结果进行功率放大、数模转换等处理,最终驱动电磁阀、电动机、开关等被控元件执行相应动作。从硬件构成来看,MCU将计算机的CPU、RAM、ROM、定时计数器及多种I/O接口(如CAN、UART)集成于单芯片,这种“一体化集成”设计使其具备体积小、功耗低、成本可控的特点,主要承担车辆中低算力需求的控制任务,是传统汽车电子系统中的基础芯片。
MCU 依据场景功能需求可分为 8 位、16 位及 32 位三大主流类型,其应用场景与性能需求呈现明确对应关系:
-> 8 位 MCU 聚焦车体子系统的基础控制场景,核心应用于车窗升降、座椅调节、空调控制、风扇驱动、雨刷操控及车门锁止等低复杂度控制功能,以高性价比满足基础执行层需求;
-> 16 位 MCU 侧重动力传动与底盘系统的精准控制,适用于引擎管理、齿轮 / 离合器控制、电子式涡轮调节等动力域场景,同时适配悬吊系统、电子助力转向(EPS)、电子刹车(EBS)等底盘机构的控制需求,兼顾运算精度与实时响应性;
-> 32 位 MCU 面向中高端智能控制场景,核心应用包括仪表板信息集成、车身电子集中控制,以及自动驾驶辅助、主动安全防护等对实时性、智能性要求较高的新兴功能。

从当前市场格局来看,8 位 MCU 凭借成本优势占据基础控制领域主流,32 位 MCU 则受益于智能网联汽车的发展需求快速崛起,二者共同构成车载 MCU 市场的两大核心阵营。
随着汽车智能化、网联化进程加速渗透,叠加电子电气(EE)架构向集中式、域控制器架构迭代升级,单车 MCU(微控制单元)的搭载需求量正持续攀升。
自动驾驶技术的快速普及成为 MCU 需求增长的核心驱动力:据 IHS Markit 统计数据显示,智能驾驶汽车的单车 MCU 搭载量较传统燃油车提升 4 倍以上。其中,32 位及以上高位数 MCU 凭借高算力、高实时性、多接口扩展能力等技术优势,能够更好地满足自动驾驶感知融合、决策控制、底盘域协同等复杂场景的运算需求,在智能汽车的动力域、底盘域、座舱域及自动驾驶域中扮演关键支撑角色,成为未来 MCU 市场的核心增长极。
2、智能座舱 SoC
随着汽车智能化浪潮推进,数字座舱渗透率持续提升,车内屏幕数量增多、尺寸扩大,“一芯多屏” 已成为智能座舱主流配置,直接带动座舱域 SoC 芯片快速放量。
SoC 芯片在智能汽车领域主要应用于智能座舱与自动驾驶两大场景。相较于自动驾驶 SoC 对算力、实时性的严苛要求,座舱域 SoC 技术门槛相对较低,成为 SoC 芯片落地智能汽车的先行赛道。在中高端数字座舱市场,高通凭借技术优势与生态整合能力占据垄断地位,主导该领域的技术迭代与市场格局。
3、自动驾驶 SoC
自动驾驶芯片是支撑高级别自动驾驶(High-level ADAS/ADS)功能实现的核心系统级芯片(SoC)。随着自动驾驶汽车智能化程度的持续提升,其对高精地图数据、多传感器融合(如激光雷达、摄像头、毫米波雷达等)产生的海量数据处理需求呈指数级增长,对计算单元的并行处理能力、算力密度及能效比提出了严苛要求。因此,在传统通用处理器(CPU)之外,集成具备人工智能(AI)加速能力的专用芯片已成为行业主流技术方案,目前广泛应用的 AI 加速芯片主要包括图形处理器(GPU)、专用集成电路(ASIC)和现场可编程门阵列(FPGA)三类。
作为通用计算核心,CPU 的技术优势在于处理中等规模的复杂运算任务。除了基础计算需求外,CPU 还具备强大的逻辑控制能力,能够高效处理复杂的条件判断、分支跳转以及多任务间的同步协调。为实现这一特性,CPU 芯片设计中预留了大量硬件资源用于分支预测优化、指令缓存及状态保存,从而有效降低多任务切换时的延迟损耗。这一架构特点使其在逻辑控制、串行运算及通用类型数据处理场景中具备不可替代的优势。
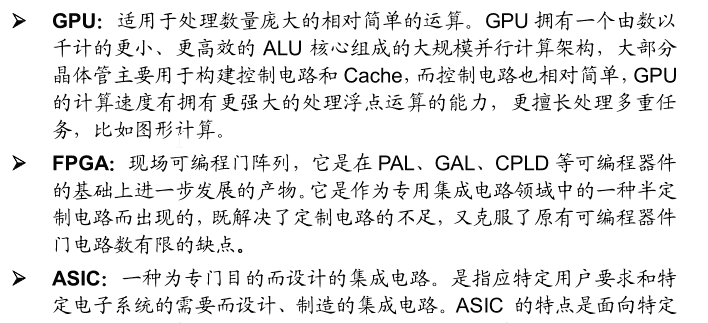
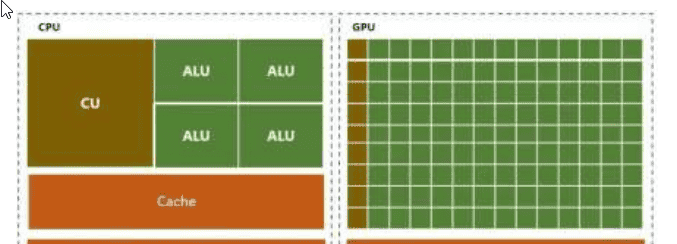
以 GPU 与 CPU 的架构差异为例:GPU 采用 “众核并行” 设计,集成了数量庞大的轻量级计算单元,配合超长流水线架构实现大规模并行数据处理,但仅保留极简的控制逻辑模块,且省去了大容量高速缓存(Cache)以优化芯片面积利用率;而 CPU 的芯片面积则主要被大容量 Cache、复杂控制逻辑单元及指令优化电路占据,用于保障复杂任务的串行执行效率,其计算单元数量相对较少,导致纯计算能力在芯片整体资源占比中处于次要地位。两者的架构差异直接决定了应用场景的分化 ——GPU 更适用于自动驾驶中的图像渲染、深度学习模型推理等大规模并行计算场景,而 CPU 则承担系统控制、任务调度等核心逻辑处理职能。

搁笔分享完毕!
愿你我相信时间的力量
做一个长期主义者
© 版权声明
文章版权归作者所有,未经允许请勿转载。如内容涉嫌侵权,请在本页底部进入<联系我们>进行举报投诉!
THE END


![在苹果iPhone手机上编写ios越狱插件deb[超简单] - 鹿快](https://img.lukuai.com/blogimg/20251123/23f740f048644a198a64e73eeaa43e60.jpg)















暂无评论内容