
1.PanoSim概述
PanoSim是一款自主研发的面向汽车智能驾驶技术与产品研发的一体化仿真与测试平台,集高精度车辆动力学模型、高逼真汽车行驶环境与交通模型、高逼真车载环境传感器模型和丰富的测试场景于一体;支持独立仿真或与Matlab/Simulink 联合仿真,提供包括离线仿真、软实时仿真、实时硬件在环仿真(MIL/SIL/HIL/VIL)、驾驶员在环仿真(RT-DIL Simulation)、数字孪生仿真平台等在内的全流程、一体化解决方案;支持高级驾驶辅助系统(ADAS)、车联网(V2X)和自动驾驶系统(AD)的自动驾驶环境感知、决策规划与控制执行子系统,以及端到端系统的算法研发与测试;也支持生成大量多样化的测试场景和传感器数据,用于模型的增量训练和数据增强。PanoSim具有很强的开放性和拓展性,便于第三方集成和二次开发,支持定制化开发,操作简便友好,已在美国通用汽车、德国戴姆勒汽车、上汽集团和东风汽车、小鹏汽车、地平线等企业和科研院所广泛使用。

图1 汽车智能驾驶一体化仿真测试平台(PanoSim)
2.主要组成
PanoSim内置的仿真实验中控台PanoExp,主控自动驾驶仿真实验配置、测试运行和任务调度,由FieldBuilder/WorldBuilder、VehicleBuilder、SensorBuilder、TestBuilder、PlotBuilder和Datamanager主要功能模块组成,涵盖了仿真实验、功能场景构建、车辆建模、传感器建模、数据处理和系统集成等六大核心功能,支持实时模拟仿真,功能强大且界面简洁,操作流程清晰直观,极大地提高了用户的使用效率。

图2 PanoSim主要功能模块
具体功能模块包括:
FieldBuilder/WorldBuilder:仿真场地与场景编辑器。其中FieldBuilder提供模块化快速构建复杂场地的能力,可以在数分钟内通过原子地图拼接和参数化修改,一次性构建出合理、合规的道路路网、道路设施、交通信号配置等场地元素;WorldBuilder提供自动生成世界模型的能力,通过配置天气、光照、交通流等模型参数,模拟真实世界中复杂动态交通场景。同时,内置虚拟城市PanoCity,其基于FieldBuilder构建而成,包含了丰富的场地特征和交通行为。
VehicleBuilder:车辆编辑器。内置丰富的车辆模型库,可根据需求选配或导入车辆的3D外形参数/文件;提供包括燃油汽车和电动汽车在内的多种驱动构型的建模,支持对轨迹跟随控制、能量控制、动力分配等控制策略和控制系统的仿真;支持对选配的车辆加装各类环境传感器和车载单元(OBU),能够真实反映道路条件(如坡度、颠簸等)和车辆动力性能对传感数据的影响。
SensorBuilder:传感器编辑器。内置18种通用性传感器模型,具备目标级、物理特性级和信号级不同粒度的仿真能力,涵盖相机(包括鱼眼相机)、激光雷达、毫米波雷达、超声波雷达、GNSS、IMU、事件相机等全类别车载环境感知传感器;支持各类传感器安装及仿真特性参数设置;提供面向应用的障碍物、交通标识、车道线、停车位、深度、示例级语义分割等环感信息及真值;支持车路协同感知的传感器设置和部署。
TestBuilder:测试编辑器。提供实验关键参数泛化、批量运行测试、自动化评价和生成报告、云平台仿真测试等功能;内置多种检测器与参考评价器,支持用户自定义评价器。
PlotBuilder:可视化编辑器。提供实验过程中仿真数据的实时可视化,支持多维数据展示与参数分析,提供数据的曲线图和动态变化展示,各类图表支持数据导出及保存。
DataManger:数据管理工具,用于实验数据、传感器、车辆、场景及测试数据的管理,同时可对现有数据进行分组、移动和删除。
3.主要模型
3.1 高精度虚拟场景模型
在虚拟场地建模方面,PanoSim支持OpenStreetMap(OSM)、OpenDrive等国际标准格式的地图数据自动化导入、解析与导出。具备快速提取道路几何描述(包括参考线、高程剖面、横向坡度)、拓扑结构(包括道路段数量和属性、拓扑连接和车道驾驶规则)、交叉口(包括连接和通行规则)、交通设施和交通标志等关键信息;支持自动拓扑修复和人工修复结合的方式补全缺失道路连接关系,修正高程偏差,实现测试场地自动构建。
在驾驶场景建筑、植被布设方面。软件内置空间分布算法,可生成符合均匀分布且具有局部变化的随机分布,结合地表空间和坡度调整建筑群位置和植入方向,实现建筑群与地表面元的精准匹配。用户选择场景风格(如城市、乡村等)后,即可实现自动在测试地图上部署符合道路结构、建筑规范和用户选定风格的道路侧方建筑群。内置丰富的树木、植被、花坛、草坪等模型,可根据仿真需求构建更加逼真的地景。


图3 PanoSim生成的城市内建筑、植被、树木仿真效果展示
PanoSim也支持以参数化原子地图(Parametric Atomic Map)作为场景构建的基础单元实现测试场地搭建。目前其内置37种原子地图,这些地图作为最小的可编辑单元,涵盖了常见的道路布局和交通场景,例如直道、弯道、交叉口、环岛、隧道、高架桥等。结合考虑了边界匹配、语义匹配、冲突检测等规则的内置算法,支持原子地图自动吸附组合的快速拼接,使用户可以轻松扩展为任意结构和面积的测试场地。与传统的顶点级场景编辑工具(如RoadRunner)相比,这种模块化设计方式大幅降低了搭建复杂场景的时间成本,同时确保场景布局的准确性与一致性。
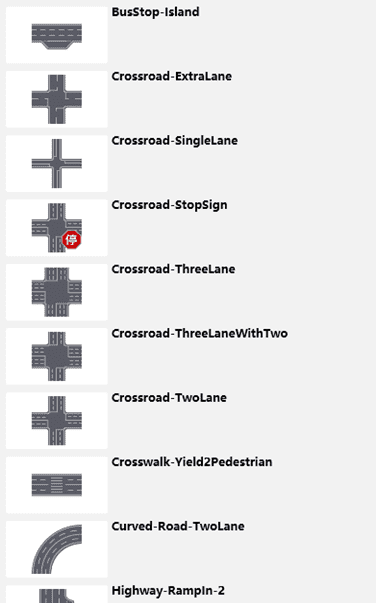
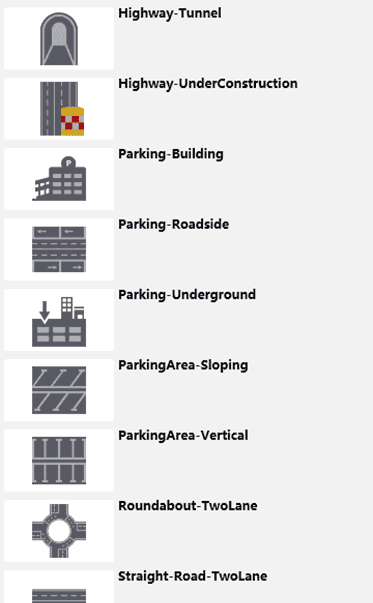
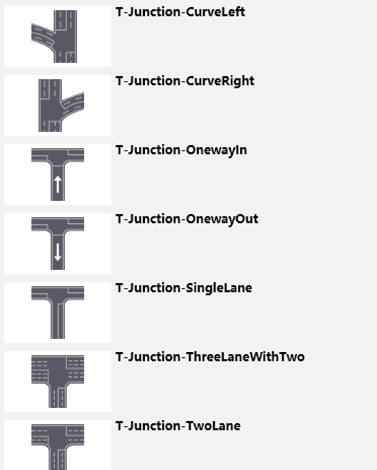
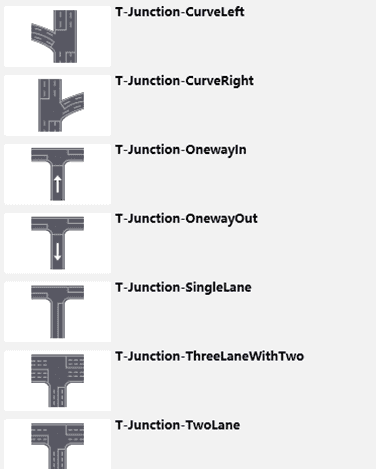
图4 典型原子地图
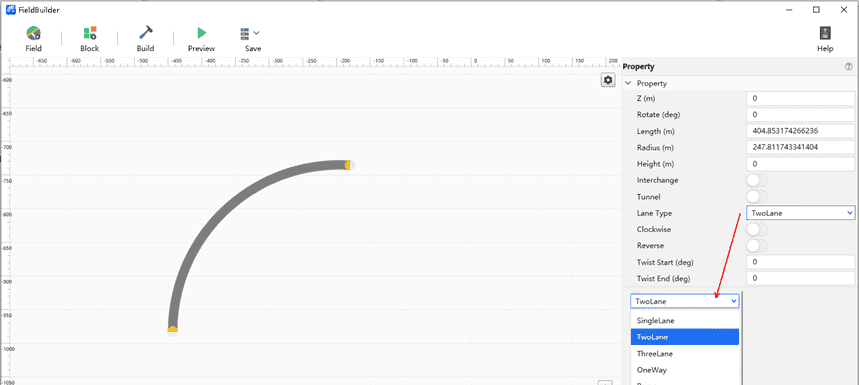
图5 原子地图编辑
在虚拟资产方面,PanoSim内置丰富的3D模型资产库,涵盖车辆(包括机动车、非机动车、特种车辆等)、行人、交通设施、动物、静态障碍物等五类对象。所有模型均包含LOD(Levels of Detail)结构。资产库支持PBR(基于物理的渲染)材质系统,通过粗糙度、金属度、法线贴图等参数实现真实表面反射特性,满足摄像头、毫米波雷达、激光雷达等多模态传感器的多波段仿真需求。

图6 3D资产库展示
天气环境(包括天气、季节、能见度、降水、温湿度等)是影响驾驶系统的重要因素,会对车辆、通信、传感器等产生重大影响。PanoSim支持参数化的天气环境光照建模,形成逼真、动态且可调控的自然环境模拟。并且,支持通过动态控制脚本在虚拟环境中模拟天气及光照的动态变化。在季节特征模拟方面,利用渲染引擎的环境渲染模块,通过动态调整植被颜色、树木密度和环境纹理等参数来呈现春夏秋冬的特征。
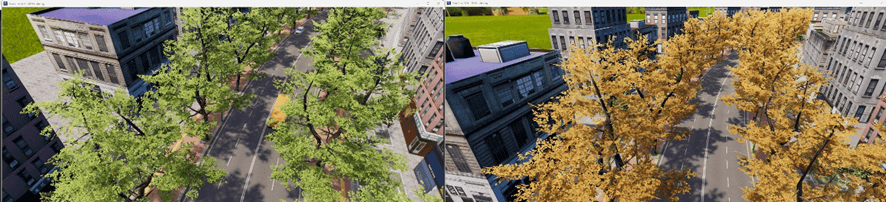
图7 季节变化的渲染效果
在全天候光照变化的模拟中,PanoSim支持通过控制太阳高度角模拟从清晨到黄昏的光源位置变化;支持调整光照强度和色温,模拟清晨、正午、黄昏等不同时间的光照效果;支持动态阴影仿真,可以精准模拟建筑物、地形和植被的动态阴影投射,以及阴影随太阳高度角变化的效果;支持通过动态控制脚本切换天空盒模型,实现晴天、多云、夜晚等仿真。下图是模拟光照变化条件下的场景仿真效果:
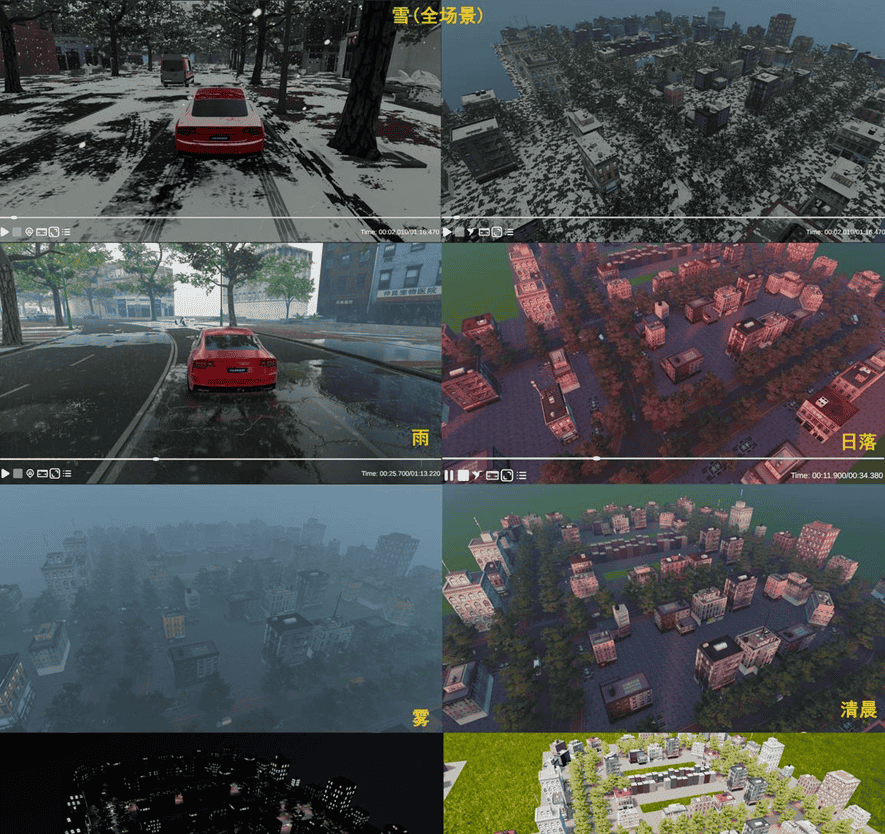
图8 模拟光照变化条件下的场景仿真效果
在降水模拟中,PanoSim通过粒子系统精确再现降雨和降雪等自然现象。用户可通过参数化设置粒子属性,进行高度定制化。例如,针对降雨效果,可调整降雨量、雨滴下降速度、降水方向及粒子尺寸分布,从小雨到暴雨等不同情景;对于降雪效果,用户可调节雪花形态、下落速度和风向,模拟雪花随风飘落的动态过程。此外,平台还支持模拟雨水积聚后水洼的反射效果、雪花堆积形成积雪等物理交互,进一步提升降水模拟的真实感,并提高传感器仿真数据的精度。下图是模拟降水、降雪的场景仿真效果:
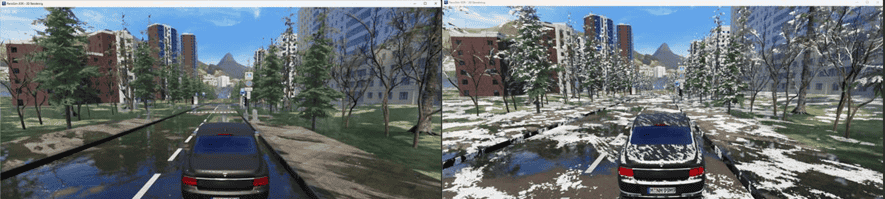
图9 降水、降雪后的场景仿真效果
在动态优化与实时渲染加速方面,PanoSim采用多层次优化架构。在几何处理层面,基于动态LOD,根据观察距离自动切换车辆模型细节层级,配合GPU Instancing技术实现同类对象批量渲染,使场景面数承载能力大幅提升。光照系统采用预计算辐射传输技术,将环境光遮蔽、软阴影等复杂光照交互烘焙为球谐系数,结合动态漫反射全局光照实现实时动态光源的高效计算。
3.2 高精度车辆动力学模型
PanoSim内置了高精度车辆动力学模型,可精确模拟车辆在各种道路和驾驶条件下的动态响应,包括不同路面状况、驾驶输入以及车辆系统之间的相互作用。无论是急加速、紧急制动还是高速转弯,PanoSim都能精确地捕捉车辆的瞬态和稳态运动特性,提供全面而深入的车辆性能分析,具体包括:
车身动力学和车轮动力学模型;
燃油动力传动系统模型:包括发动机模型、燃油消耗量模型、液力变矩器、自动变速器、分动器、差速器建模;支持前驱、后驱和四驱等各种动力驱动构型;
电驱动系统模型:包括电池模型、电机模型、电机效率模型、再生制动能量回收建模,支持前驱双电机、前驱单电机、后驱双电机、后驱单电机、四驱四电机、四驱双电机等分布式和集中式电驱动构型;
转向系统模型:包括转向管柱、电动助力、齿轮齿条式转向器、转向主销、转向轮等典型转向系统的多刚体动力学建模,包括方向盘转角与扭矩两种控制输入模式,以及后轮转向系统模型;
悬架系统模型:支持非线性弹簧力、阻尼力、上限位块和下限位块约束力等独立悬架力特性元件配置建模,以及悬架系统的非线性运动学特性(Kinematic)和弹性特性(Compliance)配置建模;
制动系统模型:支持包括制动主缸压力、制动轮缸压力、制动热衰退等在内的典型制动系统建模,支持典型制动防抱死(ABS)控制系统等;
驾驶员模型:支持闭环速度和路径跟随控制,支持变速箱挡位自动控制,支持方向盘转角与扭矩控制;
3D道路路面模型:支持典型的基于X-Y坐标和S-L曲线坐标间的相互转换、基于S-L坐标的3D道路及其路面附着系数、滚动阻力系数等建模;
空气动力学模型:支持三维空间空气阻力、升力、侧向力和力矩等建模;
轮胎动力学模型:支持纵侧向复合行驶工况下轮胎力、轮胎弹性迟滞特性、低速行驶工况的建模,支持轮胎滚动阻力矩与功率平衡特性、以及轮胎力与轮胎压缩量或运动量之间关系的建模。
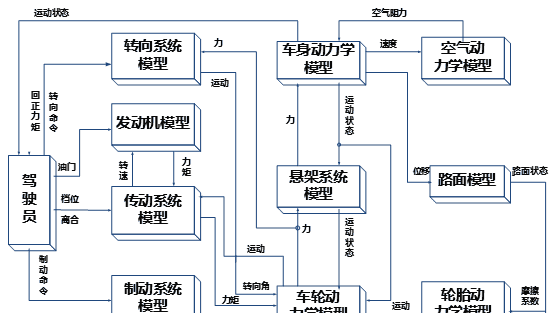
图10 高精度车辆动力学模型模型架构
3.3 驾驶员模型
PanoSim中内置了驾驶员模型,经过正确的实验配置后,能够完成仿真实验中的驾驶任务。PanoSim提供了两类驾驶员模型:控制型驾驶员模型和智能型驾驶员模型。控制型驾驶员模型包含横向控制和纵向控制模块,可以根据用户指定的速度表格和期望轨迹,实现速度跟随和轨迹跟随功能。
智能型驾驶员模型是一个全栈自动驾驶系统,采用模块化设计理念,内置的自动驾驶系统严格遵循行业标准的分层架构,将整个自动驾驶系统划分为三个核心子系统:感知子系统、决策规划子系统和控制子系统。子系统彼此完全解耦。并且在决策规划与控制模块中进一步细分为横向决策规划、纵向决策规划、横向控制和纵向控制模块。通过模块化设计,具备高度的灵活性和扩展性,能够适配多种自动驾驶测试场景。
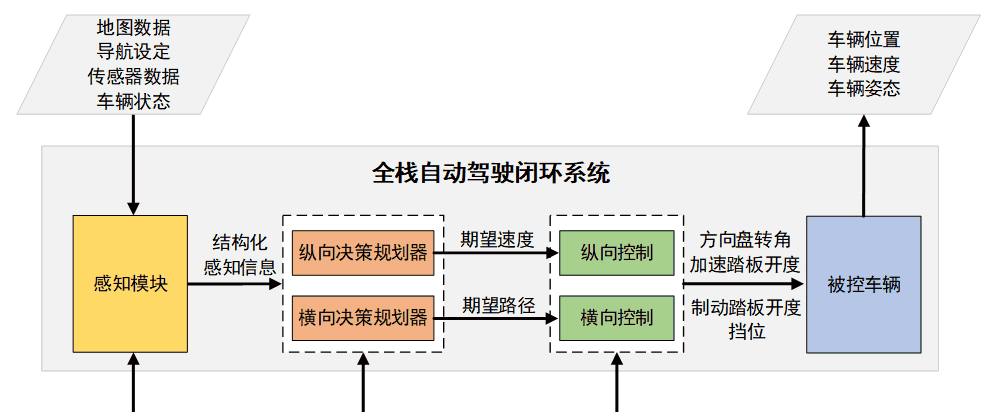
图11 内置全栈自动驾驶系统软件框架
智能型驾驶员模型的感知、决策规划和控制子系统采用顺序结构相互衔接。感知模块的上游为原始传感器信号,如相机反馈的图片和激光雷达提供的点云信号,感知模块处理后的结果传递给决策规划子系统。决策规划模块根据感知数据输出决策信息,传递至控制子系统。控制子系统最终输出方向盘转角、加速踏板开度、刹车踏板开度和挡位信号等参数,用于精准控制车辆的运动。
用户自研的自动驾驶算法,包括但不限于环境感知模型、数据融合模型、决策规划模型、轨迹跟随模型等,都可以接管智能型驾驶员模型的子系统模块,形成软件闭环仿真。例如,用户可以接入用户自研感知算法,处理来自相机、雷达等传感器的数据,而保留系统的决策规划模块。同样地,在测试仅包含横向控制算法的自动驾驶系统时,可以保留其感知子系统、决策规划子系统和纵向控制模块,以确保横向控制算法测试的完整性和有效性。
3.4 复杂动态交通场景模型
交通仿真是自动驾驶系统测试的重要技术,模拟真实交通环境和行为,帮助评估和优化自动驾驶算法。通过再现复杂场景,它提供安全的测试环境,识别潜在风险,为技术验证和改进提供重要依据。PanoSim提供两种交通仿真的能力。
第一种仿真能力,是基于真实世界采集到的数据在仿真平台进行数据回灌,形成测试交通场景。路采数据需通过第三方工具转换为OpenScenario文件后进行回灌。支持根据用户识别的场景关键参数,在构建的逻辑场景模型上进行关键参数泛化,形成批量化测试场景。
第二种仿真能力,是通过基于模型或者规则的方法建模交通车行为,形成交通流或者交通场景。目前PanoSim提供交通干扰模型、随机交通流模型、异常交通流模型和交叉口模型和数据驱动的交通流模型5类交通场景模型。具体为:
交通干扰模型(Disturbance):基于规则设计的以干扰主车正常驾驶为目标的局部交通场景模型,包括车道干扰、路口干扰、行人干扰等,支持以时间、距离、速度等多种触发模式,可单独设置干扰对象的行驶路径、运动速度、横向和纵向控制。
随机交通流模型(Traffic-S):内置随机交通流模型。该模型考虑了车辆之间的间距、加速与刹车行为,以及交通参与者的随机决策。这使得生成的交通流在动态特性上更加贴近实际,能够再现不同交通条件下的车辆运动特征和群体行为。用户可通过配置交通流的平均行驶速度、密度、稳定性、交通车种类比例、驾驶员驾驶风格比例、交通设施等,快速生成具有物理特性的且符合经验的交通场景。并且,该模型通过全局中观交通模型和局部微观交通模型的同步切换,最高支持10000个交通参与物的实时交通仿真。
异常交通流模型(Traffic-A):该模型基于规则设计,能够模拟在安全条件下可能出现的无序、异常交通流,如交通交织区域(交叉口、合流分流区)的交通流,或由于不文明驾驶行为、施工区变道冲突、天气环境等因素引发的交通异常。Traffic-A由车辆模型(包括跟驰模型、换道模型、行为决策模型、侧向力模型、驾驶员心理模型)、行人模型、机车模型(包括自行车、摩托车等,正处于开发状态)共同构成。其中,车辆模型通过扩展参数空间(如考虑了道路摩擦系数、道路集和结构和横向坡度、道路拥堵状态、能见度等),更加逼真地模拟车辆的微观驾驶行为。驾驶员心理模型,用于模拟仿真过程中驾驶员对车速、舒适加速度、舒适减速度、侧向间距等期望值的动态更新。这些期望值会根据交通拥堵状态、天气条件、附着系数等因素的变化进行调整。行人模型基于社会力模型建模,考虑到了自驱动力、人际互作用力和环境作用力,构建了行人意图识别和微观行为决策模型,引入随机停顿、变速、异常行为的概率分布。目前支持100+行人过街、街道穿行、人车通行路口冲突、人车混杂场景的仿真。机车模型根据非机动车行驶特点,通过车辆模型和行人模型派生,正处于开发状态。
交叉口模型(Traffic-C):该模型采用层级化场景动力学方法实现交叉口复杂场景建模。首先通过场景要素解构,将场景分解为道路结构层、动态交通层与静态设施层,解析各层元素间的耦合机制。基于多体动力学理论,将交叉口抽象为刚体交互系统:以期望速度生成车辆运动的驱动势能,通过安全距离模型构建车-车排斥力场,依托交通规则约束建立车-路边界势场。三类力学关系通过牛顿-欧拉方程统一描述,构建车辆运动状态微分方程组并求解。目前,该模型能够实现百辆级交通流的毫秒级状态更新。模型已适配丁字路口、十字交叉口、X型枢纽及环岛等含有交叉口的道路拓扑结构,支持车道级转向规则、信号灯相位控制等精细化约束。
数据驱动的交通流模型(Traffic-D):为了更好的适应本土自动驾驶开发和测试的需求,关注交通的地域性差别对自动驾驶测试的重要性,提供基于中国人真实道路交通数据的数据驱动交通模型,以达到测试环境能够反映真实交通特点的目的。数据驱动交通模型主要用于模拟真实交通中的一般现象以及难以通过机理模型反映的车间复杂交互、车辆运动无序等现象。该模型能够实现无路口结构化道路的交通环境仿真。
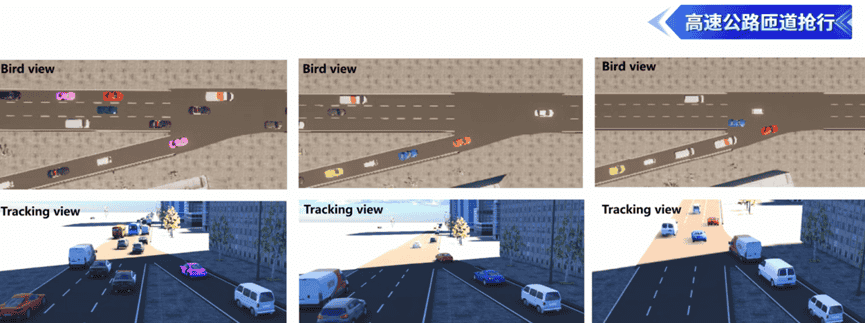

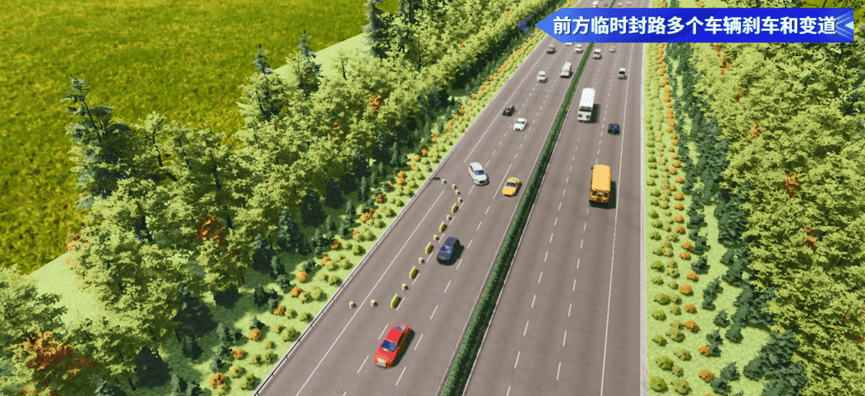


图12 交通场景仿真
3.5 车载传感器物理模型
3.5.1 相机
PanoSim可支持两种相机建模方式,基于游戏引擎光栅化渲染和成像特性后处理的相机模型,以及基于PBR的数字相机物理模型。
基于游戏引擎光栅化渲染和成像特性后处理的相机仿真方案是当前常见的技术路径。其主要通过光栅化技术快速生成基础图像,并利用后处理(如色彩调整、模糊处理等)模拟真实相机的成像效果。该模型优势在于计算效率高、实现简单、易于部署,尤其适合要求实时仿真的应用场景。目前模型支持基础参数设定,包括分辨率、水平/垂直视野范围、焦距等。另外,该模型引入成像特性算法,能够模拟各种复杂的实际成像过程中的物理特性,其中包括畸变,模糊、暗角、景深、色像差、噪声、运动模糊、颜色校正、伽马等。PanoSim提供技术支持,实现对该传感器各类参数进行标定匹配,从而可以定制化的模拟特定型号的单目相机。单目相机的所有模型参数均可以根据用户的实际需求进行调节。
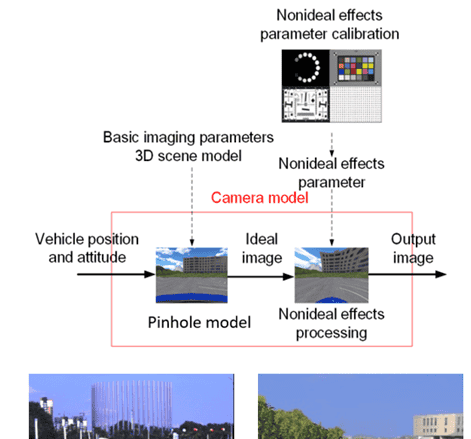
图13 基于游戏引擎光栅化渲染和成像特性后处理的相机仿真方案
PanoSim也支持基于物理渲染的相机白盒建模方案,其通过光线追踪技术,模拟光线的传播、折射和反射过程,重现相机成像的真实物理过程。该方法结合镜头、传感器、ISP等参数,精确还原成像效果,具有高保真度、高可控性和良好的可解释性。但其渲染速度无法满足实时,该方案更适合于对成像质量要求高但实时性需求较低的场景。下图为基于PBR技术的相机白盒建模方案:
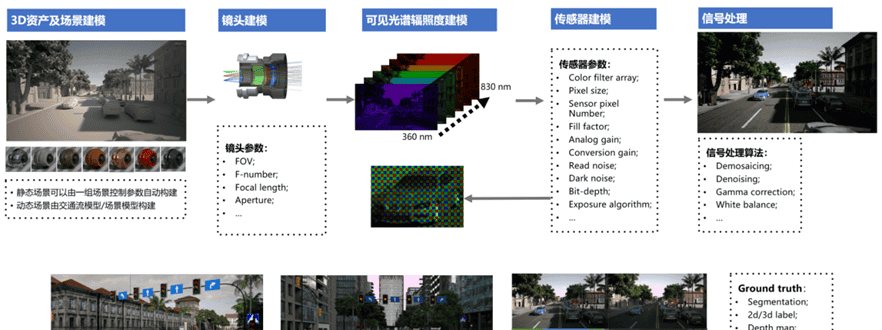
图14 PanoSim的基于物理渲染的相机白盒模型建模技术路线
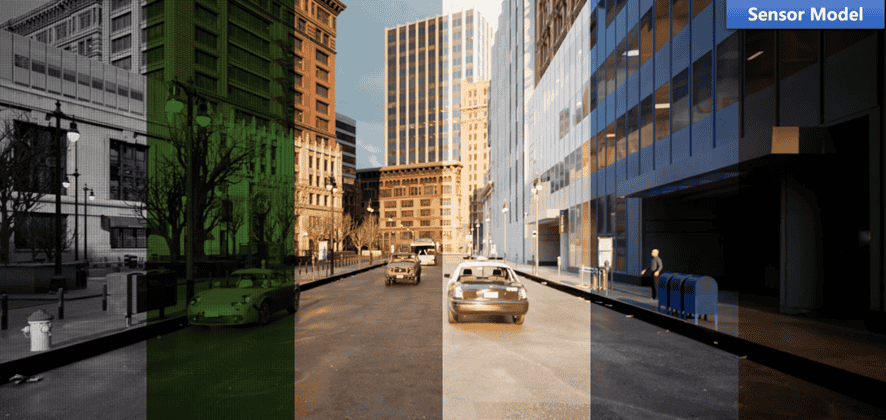
图15 传感器仿真的各阶段效果
3.5.2 激光雷达
PanoSim研发了基于物理数据双重驱动的激光雷达模型,模型将点云生成分为物理现象级点云生成以及数据驱动的点云生成两部分。
在物理现象级点云生成部分,将激光雷达探测方程进行公式推导,把激光雷达最大探测能力表示为系统常数项、目标材质反射率、以及不同天气下的衰减系数这三部分的乘积。衰减系数通过国际电气联盟提供的不同波段下电磁波在各类天气下的衰减模型进行建模,标准反射率板可以获得反射率,最大探测距离可通过测量获得,这样对于一个确定型号的激光雷达而言,系统常数项就能够求解。这实现了既考虑元器件功能影响的前提下,同步解决参数黑盒问题。在降水降雪影响下的噪点仿真部分,根据求解获得的理论探测距离,以及沉降物空间尺度分布函数完成仿真。
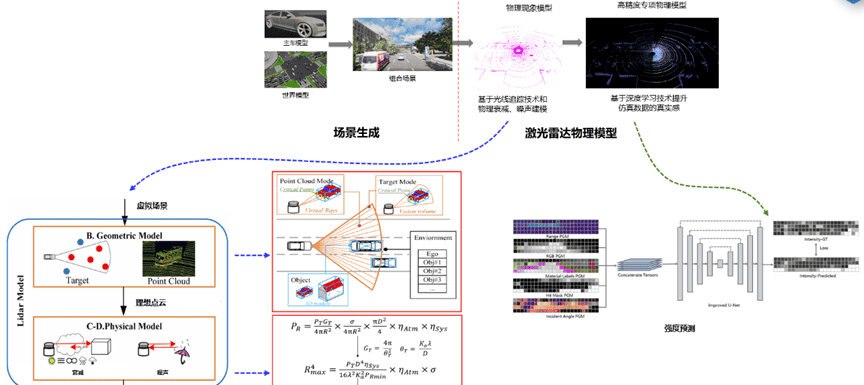
图16 物理现象级点云生成技术路线
考虑到为了提高仿真的实时性,激光线与场景中物体表面的交互仅进行有限(≤3次)投射,计算击中点处及反射后的能量变化存在误差,所以通过有监督的深度学习训练点云强度预测模型,补充获得点云的反射强度值,然后将空间位置和强度值合并生成点云数据。
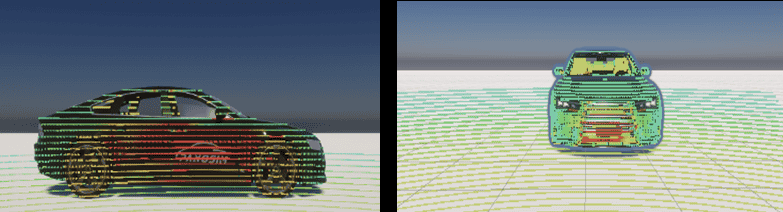
图17 模拟点云(空间点及反射强度)展示效果
分别从可控环境下激光雷达打点数量,反射强度和下游应用任务训练结果角度进行模型评估。
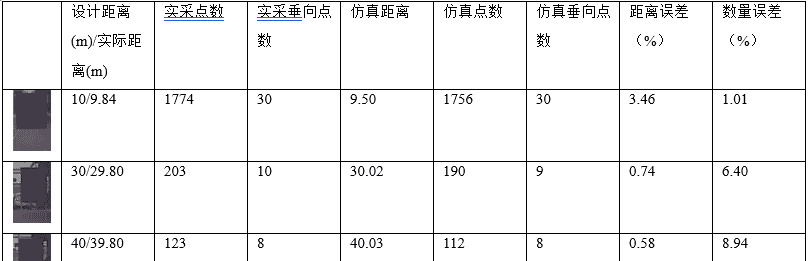
1)为了验证激光雷达打点的几何精准性,用标准反射率板作为验证靶标,在仿真平台中构建1:1的孪生场景进行直接验证。数据显示,仿真点云能够将测距精度和点数误差控制在10%以内。
表1 打点数量、距离精度验证(真实激光雷达型号:禾赛AT128,仿真平台:PanoSim)
2)反射强度验证
这里展示的是强度预测模型的推理结果。结果展示,在KITTI数据集的连续帧中,各类别目标强度预测值与真实值之间的平均MSE为0.064。
表2 KITTI数据集连续帧点云数据回波强度预测精度验证结果(激光雷达型号:Velodyne 64E)

3)下游应用任务验证
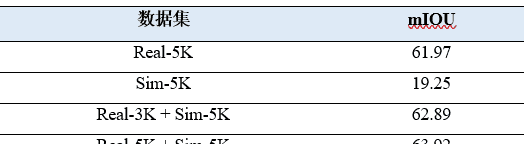
这里展示的是选取了两个典型下游应用任务进行模拟点云质量的间接验证。结果显示,将真实数据和仿真数据进行有效比例的混合训练,能够明显提升在目标检测、语义分割等任务上的表现。
表3 3D目标检测:仿真数据在SECOND模型的验证结果
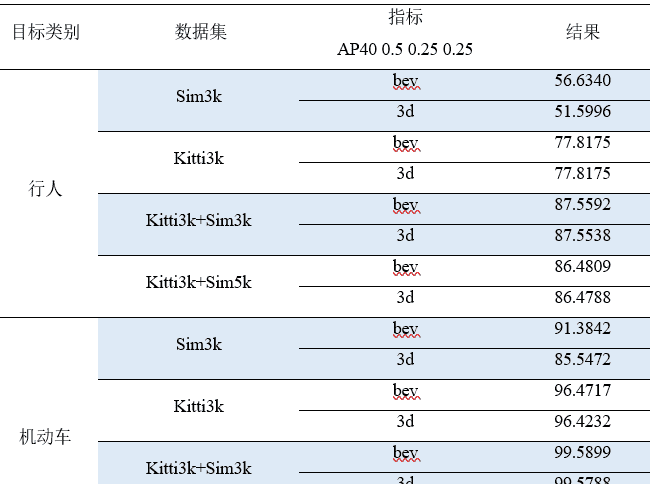
表4 语义分割:仿真数据在KPConv模型的验证结果
3.5.3 毫米波雷达
PanoSim内置的毫米波雷达模型,基于真实物理机理,全面模拟雷达信号的传播与处理过程,并通过黑盒雷达内部拟合各元件的参数,量化其对信号的影响。
采用射线追踪法获取返回至雷达的信号参数,而不使用远场积分计算雷达回波信号。具体步骤包括射线参数设置、射线发射、路径寻踪、接收判断,以及参数计算等。
在雷达功能建模中,信号处理分为两个步骤:首先建立功能模型以模拟雷达各元件的功能和工作流程,其次获取真实雷达射频模块中的参数,量化各元件对信号的影响,最终形成能够反映射频模块信号处理方式的信号传递函数。
由于雷达是一个高度集成的黑盒,根据各射频参数因变量的差异,提出针对性的数据采集方法,从端到端的测试数据中分离出各参数数据。通过插值等方法拟合这些分离出的参数值,建立参数模型。
最后,使用3D FFT、CA-CFAR和EDBSCAN算法处理雷达回波数据,以输出检测到的目标列表。
分别对比雷达模型与真实测试数据、理想雷达模型在不同层级输出信号上的数据。
1)原始信号对比
从下图可以看出,基于光线追踪技术的理想雷达射频模型产生的回波信号只是单纯的点频信号,无法体现出雷达射频电路内部各个因素导致的频偏、频谱扩展和幅值的变化。PanoSim的毫米波雷达白盒模型的计算结果与测试结果在主信号的频率和频谱分布上非常接近,主频信号的幅值和噪声的分布也非常相似。
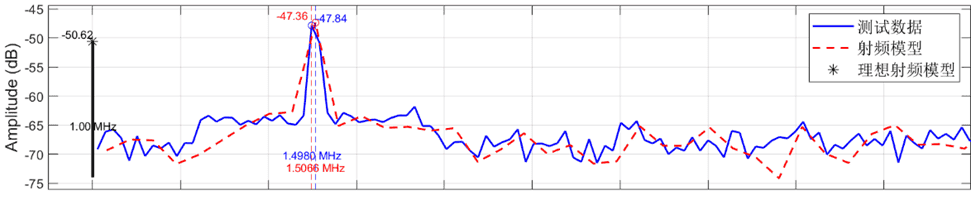
图18 雷达模型输出的原始数据对比验证
2)原始回波图数据对比
这是典型场景下的对比数据。第一列中的R-A和R-D图展示了在微波暗室中,使用真实雷达板卡接收雷达模拟器目标信号后的实测回波数据;第二列是通过光线追踪计算得到的理论回波模拟数据;最后一列是PanoSim的毫米波雷达白盒模型的回波模拟数据。能够看出,在大多数测试场景下,PanoSim的毫米波雷达模型能够反映目标回波区域扩散,且其扩散分布与实测数据高度吻合,其回波精度相较于光线追踪计算的回波数据,MSE误差可降低至原来的1/10左右。
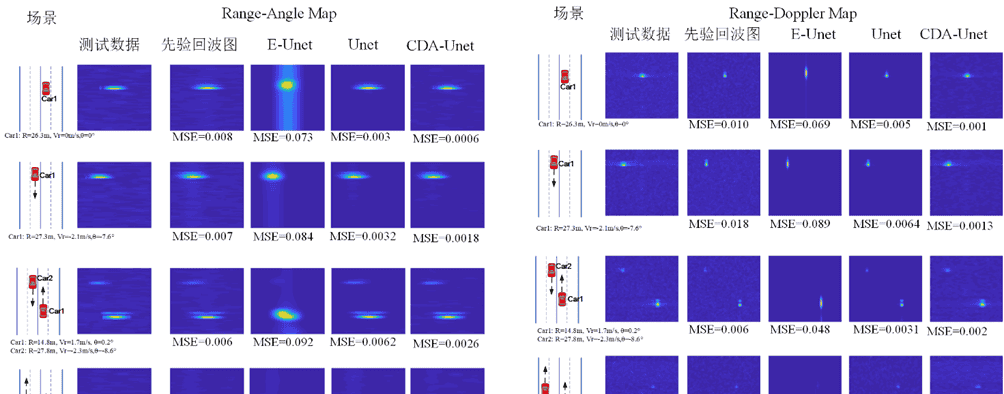
图19 雷达模型输出的回波图数据对比
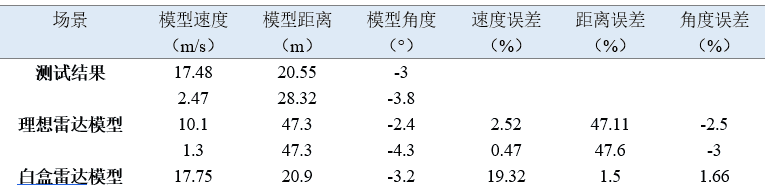
3)目标级数据对比
下表展示了模型回波信号接入共同的雷达目标识别算法,产生目标列表的结果。可以看出,PanoSim的毫米波雷达模型预测值相对雷达检测值的误差基本都在5%以内。该结果明显优于基于光线追踪的理想雷达模型,证明了PanoSim的毫米波雷达白盒建模方法建立的模型可以在仿真系统中实现高精度的预测结果。
表5 目标级雷达的测试结果
3.5.4 GNSS
研发了高精度的GPS模型。GPS通过卫星发射无线电信号,接收机接收并计算每颗卫星到接收机的距离,从而解算出接收机的位置。该模型考虑了影响最终定位结果的关键因素,如卫星星历,卫星遮挡模型及误差模型。
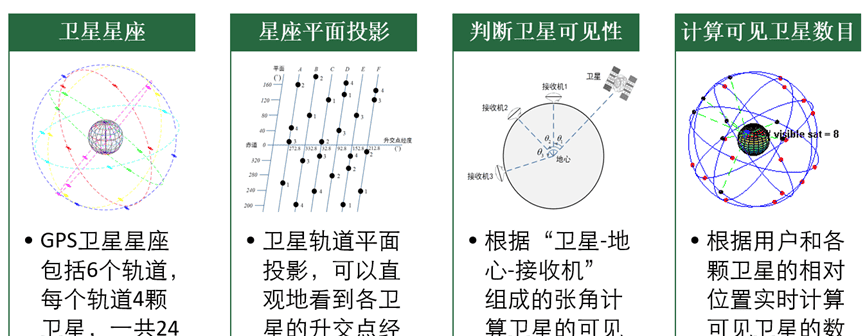
图20 GPS仿真的星历、遮挡模型
卫星信号传播的关键是通过卫星的精确位置和时间信息计算信号传播时间。首先,根据卫星轨道数据获得GPS卫星星座的具体信息。其次,由于高楼、隧道等物体可能会遮挡卫星信号,因此必须判断可见卫星的数量。我们在实施过程中利用Unity引擎中的射线检测判断物体遮挡。最后,在解算接收机位置时,增加了伪距模型,分别从与卫星有关的误差、与信号传播有关的误差和与接收机误差三方面进行模拟。在信号传播误差建模中,主要模拟电离层延迟、对流层延迟等因素。在电离层延迟采用Klobuchar模型计算,而对流层延迟使用Saastamoinen模型计算,通过这些误差模型可以得出延迟误差。
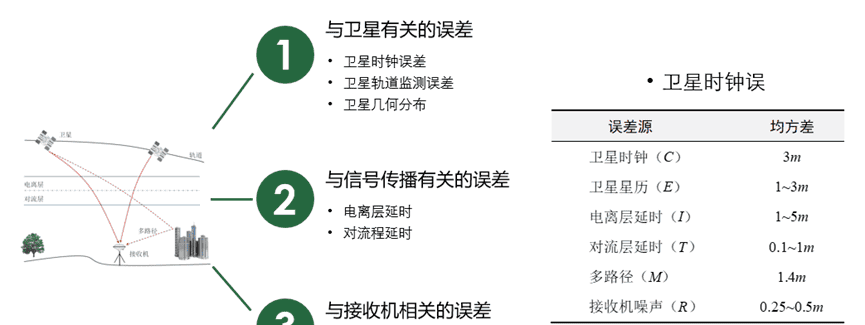
图21 GPS仿真的误差模型
下面是模型的一些验证结果。图22(a)是设定仿真时间为1000s,模拟静态单点定位的仿真结果。经纬度根据WGS-84世界坐标系的定义转化以m为单位的直角坐标。图22(b)是利用车载GPS接收机实际测量静态单点定位结果。
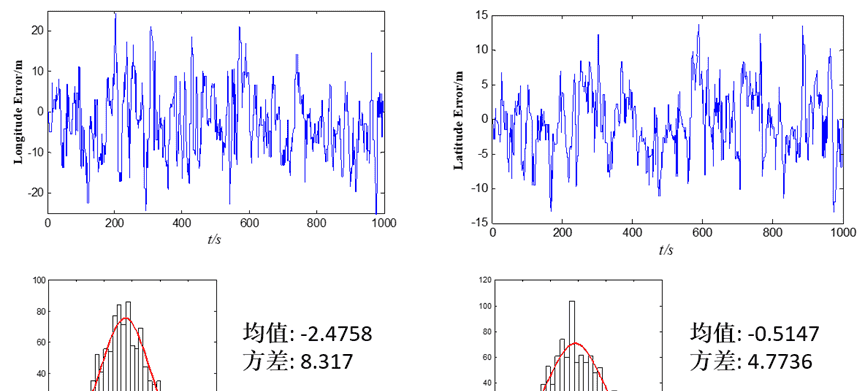
图22(a) GPS模型模拟静态单点定位结果
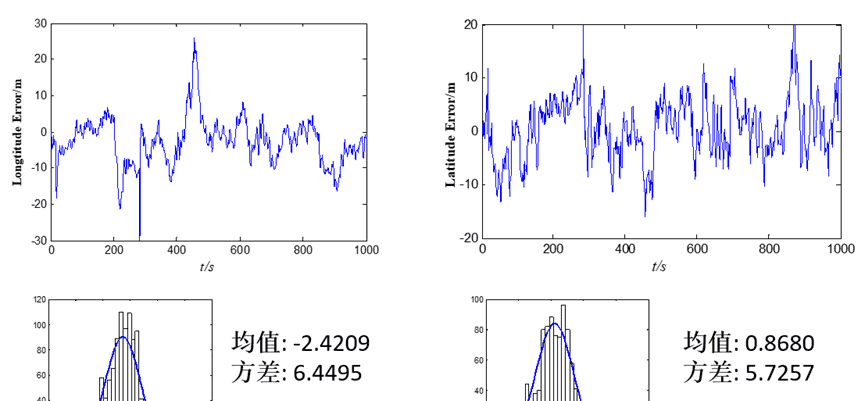
图22(b) 利用车载GPS接收机实际测量静态单点定位结果
两者对比能够看出,GPS模型单点模拟的精度与实测结果非常接近,其中经纬度的均值差异性控制在±1m内,方差差异性控制在±3m内。
3.5.5 超声波模型
提出了一种高保真超声波传感器建模方法,可应用于虚拟智能驾驶场景。模型综合考虑了传感器特性、传播介质及目标物体的物理属性。其中,传感器特性包括超声波传感器的传输模式、灵敏度和发射方向;传播介质建模分析了大气条件对超声波传播衰减的影响,如温度、湿度和气压等;目标特性则考虑了目标物体的物理属性(如几何形状和声学阻抗)对信号反射的影响。通过时间飞行(TOF)技术计算目标距离,并评估信号衰减及噪声的影响,以确保在复杂环境下的准确性和可靠性。
该模型能够模拟超声波传感器在不透明障碍物、透明障碍物和高反射表面检测中的探测数据,尤其适合盲点监测和自动停车等功能的仿真测试。
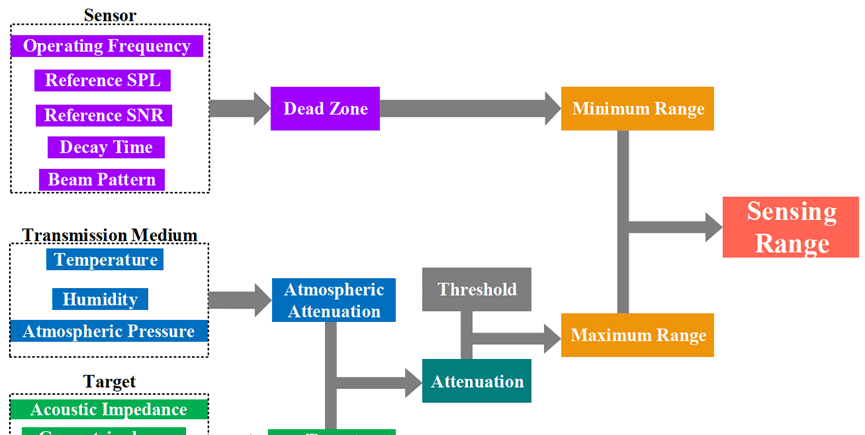
图23 超声波模型建模方案
3.5.6 V2X
在自动驾驶模拟仿真测试中,V2X(Vehicle-to-Everything)的建模和仿真是评估车联网技术与自动驾驶系统协同性能的关键环节。基于PanoSim一体化仿真软件所提供的仿真模型,包括V2X传感器模型、车辆动力学模型、高精度复杂三维场景(汽车行驶道路和道路网络拓扑、交通标识和交通信号灯、数字地图导入、天气和光照等等)以及实验结果可视化功能,结合相关无线通信设备和GNSS模拟器,搭建符合C-V2X开发测试的各类场景工况,支持客户面向C-V2X产品的功能开发、系统开发、整车集成开发,搭建智能网联汽车高效、高逼真、可重复且可自动化的研发、测试和评价体系。以解决由于实车、真实环境测试等条件有限,所以无法完全模拟实际的车辆运行状态及多车或者不同交通路况等复杂的实际交通情况的问题,以及实车、真实环境测试成本高,危险工况测试困难等问题。
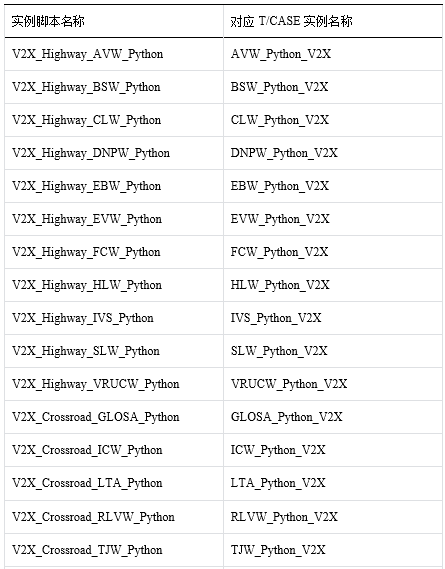
PanoSim内置的V2X模型,其支持通信协议建模,涵盖车-车(V2V)、车-路(V2I)、车-网络(V2N)等多种形式,满足汽车工程协会关于车用通信系统的应用层和数据交互的标准(T/CSAE 53,T/CSAE 157),支持通信协议的消息格式、传输延迟、带宽限制、数据包丢失率等设置,以反映实际通信环境的影响。支持典型V2X应用场景和事件的仿真,提供符合T-CASE标准的除近场外所有一期应用及部分二期应用实例(蓝底标出),可以通过动态参数调节,测试V2X对自动驾驶系统的支持能力。提供标准化接口支持,能够实现与实际设备和协议的无缝对接,目前已经完成OBU硬件设备接入的供应商包括海康、大唐、商泰等。支持与RS(Road Side)的GNSS模拟器、综测仪等进行联合仿真。
表6 支持符合T-CASE标准的所有应用实例
PanoSim-V2X设计了三种“开发对象接入”方式,以应对不同产业链分工和用户需求的差异。MIL(Model in the Loop)针对算法开发用户,提供plug-in架构和算法开发模板,使用户集中于算法实现,无需关注底层硬件和软件工程化。SIL(Software in the Loop)接入适用于软件开发用户,允许他们使用类似最终操作系统的平台(如Linux)进行V2X算法转换,同时支持V2X Message over ETH和GNSS更新的交互,简化了V2X底层通信模块的需求。HIL(Hardware in the Loop)面向产品开发和测试用户,与实际硬件和软件平台结合,实现V2X Message和车辆状态等的互动,确保与真实车辆环境一致。这三种接入方式体现了一种渐进式一体化开发手段,符合汽车行业V开发模型,便于行业从业者理解和应用。
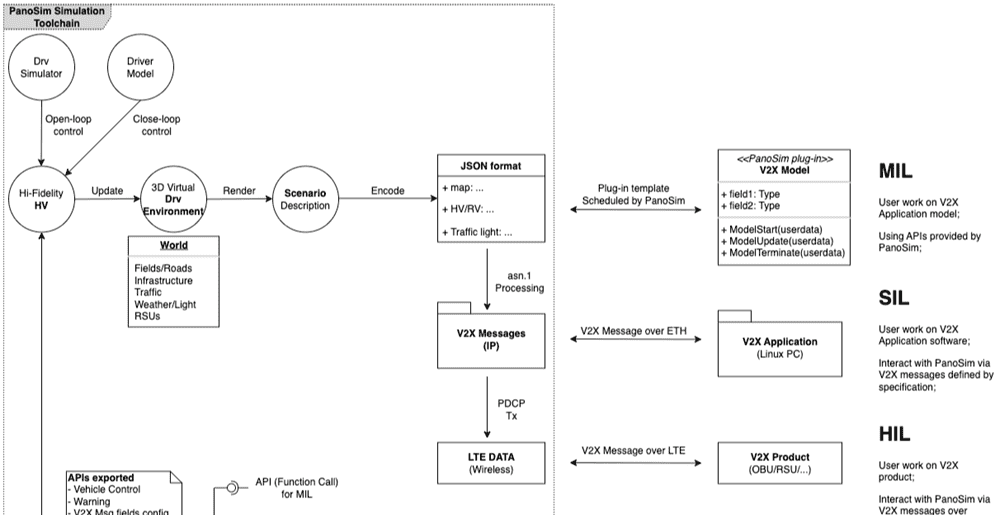
图24 PanoSim-V2X三种“开发对象接入”方式
3.5.7 多传感器分布式仿真
支持多种传感器模型在分布式运行环境下的同步数据采集,为在虚拟环境下展开多传感融合技术的研发提供了统一的平台支撑。同时,软件也支持阻塞运行模式,保证每帧数据保存完成后再进行下一步,确保仿真的可重复性和数据完整性。
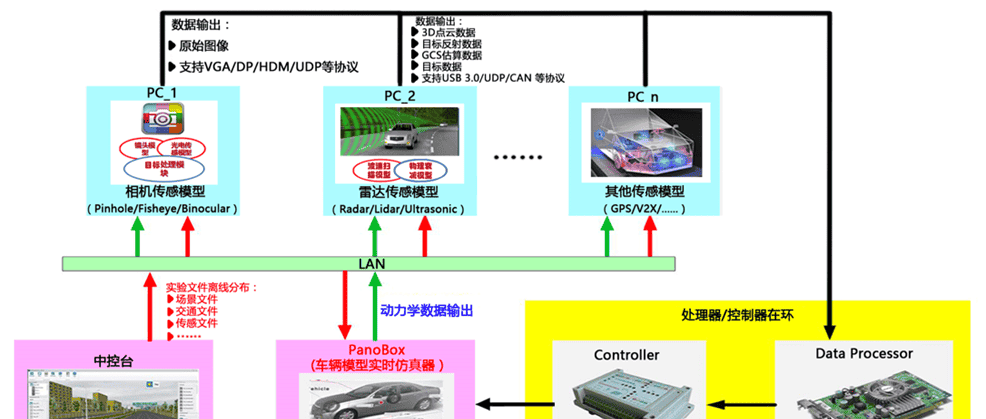
图25 分布式多种传感器模型在环
3.6 智能车灯模型
智能车灯仿真属于应用级需求,其核心技术与场景建模、光学系统建模等关。PanoSim内置High Beam(HB)远光灯、Low Beam(LB)近光灯、Signal Beam(SB)投影灯三类智能车灯模型,融合了车灯的光学特性模型、环境交互模型,光路传播衰减模型等多种要素。其中,光学特性建模考虑不同波长光源的辐射强度、光束分布等因素;环境交互建模利用光线追踪技术模拟光的反射、折射、散射等效应;衰减模型则涉及到光源的有效照射范围及其距离衰减曲线的建模。
下图第一行从左到右分别为 HB的后车高空视角、前车视角、鸟瞰视角,3张车灯仿真效果图。第二行从左到右分别为HB/ADB激活状态下关闭某些扇区时候(左前方放置了一部对手车)的仿真效果图片。能够看出,在对手车出现后,ADB功能激活自动关闭扇区,防止对对面车辆驾驶员造成眩晕干扰。
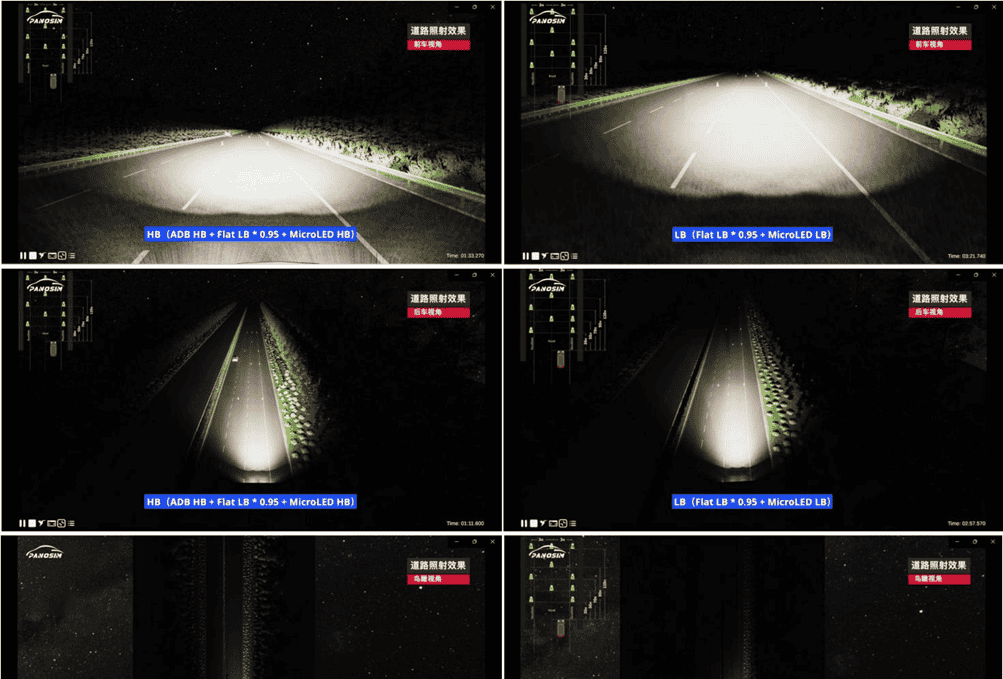
图26 HB/LB状态多视角对比
下图展示了远光灯和近光灯在驾驶员视角以及对面车辆驾驶员视角下的仿真结果,中间是光源配光曲线的仿真数据可视化效果。
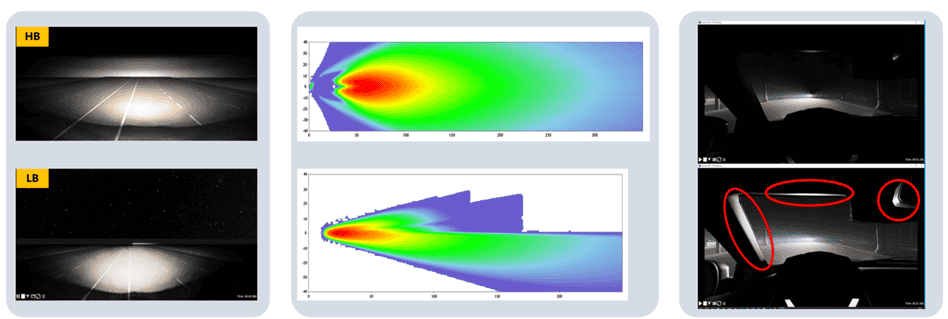
图27 远光灯和近光灯在驾驶员视角以及对面车辆驾驶员视角下的仿真结果
此外,从应用需求的角度来看,还需要对车灯的控制逻辑进行建模,例如自适应前照灯(AFS)、自动远近光切换(ADB)、矩阵式灯光控制等。完整的仿真系统通常需要结合算法来自动检测前方车辆并切换灯光,以调整照明强度、区域和避免眩光。目前支持的控制逻辑模型,包括近光/远光灯的开关控制、指定扇区的开关控制、照度调节、姿态控制以及矩阵式灯光控制等功能。
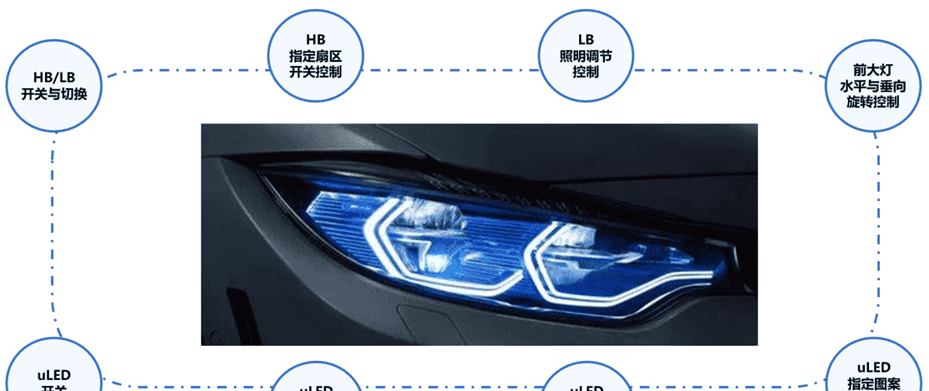
图28 智能车灯支持的控制逻辑模型
从功能支持方面,目前远/近光灯能够支持以下功能:
依据不同的车辆模型,灵活配置智能车灯安装位置
支持指定车灯IES文件
支持配置车灯光照强度(单位:lux)
支持动态调整照射范围
支持动态调整车灯光照强度
支持动态调整车灯航向角
支持动态调整车灯俯仰角
投影灯能够实现以下功能:
依据不同的车辆模型,灵活配置智能车灯安装位置
支持配置车灯光照强度(单位:lux)
支持动态修改投影纹理
最后,PanoSim提供智能车灯的典型测试场景,如夜间、弯道、隧道、雾天等场景。智能车灯需要通过多场景融合仿真来验证,确保光源特性在动态环境中的一致性。
3.7 软实时仿真
为了满足对实时性有一定需求,但因资金或硬件限制,无法采用硬实时系统的用户需求, PanoSim提供高精度的软实时仿真模式,能够在普通PC机上支持外部模型与仿真系统高达1000Hz的调度能力和数据交换能力,在同类竞品中表现出色。通过将PanoSim作为平台,快速集成软实时功能,用户可以高效地开发基于1000Hz仿真的算法(如PanoDrive支持的魔爪驾驶模拟器正是基于此框架实现)。
此外,PanoSim支持选定专业的CAN卡,并整合软实时调度器模块和CAN卡I/O,便于用户进行基于软实时的HIL测试。用户可以通过图形化的DBC编辑器,在界面上轻松配置CAN信号、数据总线和动力学模型的通道连接,实现纯UI操作完成HIL测试。
同时,PanoSim提供1000Hz实时数据监控与历史数据分析导出功能,使用户能够实时查看和分析数据,或进行进一步的离线分析。
4.特色优势
4.1 高精度、高保真仿真模型
PanoSim拥有完整的自主研发的高精度、高保真仿真模型体系,涵盖环境、道路、车辆、传感器等关键要素,能够精准还原真实世界中的驾驶场景,具备构建并仿真涉及自动驾驶系统测试的功能安全场景、预期功能安全场景、边缘场景和极限工况场景等。
各类仿真模型在多维度验证评价下,其精细度和真实性具有显著优势。相比于传统仿真平台,PanoSim的高精度自主模型还具有高度灵活的定制化能力,能够根据开发需求快速调整参数,以适配不同地区、不同法规要求的测试需求。
经过严格校准的仿真模型与真实测试数据高度一致,为虚拟测试结果的可信度提供了有力保障。这种闭环的研发模式使平台在数据积累与模型优化上具有持续进化的潜力,显著提升了开发效率和产品迭代速度。
4.2 灵活开放的仿真软件架构
PanoSim采用灵活开放的软件架构,具备高可扩展性和强兼容性,为用户提供多样化的定制和集成能力。其软件工具链中的所有开发工具,均采用模块化设计,支持功能组件的按需加载和自由组合,便于适配多种自动驾驶测试需求。
PanoSim为用户提供了基于开放式API的插件系统,包括内置插件和用户自定义插件。内置插件包括交通模型插件、干扰模型插件、传感模型插件和评价模型插件,以及作为案例的智驾算法插件。两类插件均支持在搭建仿真实验的不同阶段接入及进行参数配置,并在仿真实验运行时由相应的调度器提供调度运行能力。PanoSim为用户直接提供大量的开放源码实例,并结合实际仿真业务,覆盖了全部的API使用方法,以及各种模型插件的推荐写法。
PanoSim开放标准化接口,支持与主流开发工具和第三方仿真平台的无缝对接,同时兼容OpenX系列标准,实现场景、路网及传感器模型的高效集成与复用。
4.3 标准化仿真测试工具链
形成了以PanoSim仿真软件为核心仿真引擎的仿真测试工具链,可广泛适用于汽车智能化进程中多个领域和方向的开发与测试,例如智能驾驶、智能网联、智能底盘等;能够以实验室方式大幅降低乃至取代道路测试,提升正向研发迭代效率,降低成本,规避路试安全风险,进一步可以形成道路到实验室的数据闭环(Data2 Simulation),以及实验室到道路的软件升级(OTA)。

图29 以PanoSim-inside的仿真测试具链
基于自动驾驶栈分层特点,提供丰富的数据接口支持-真值/目标/信号级感知数据、地图数据、交通数据、动力学数据等,支持控制、决策/规划、感知算法的集成与解耦开发。
开发对象仿真系统快速搭建,提供多样化I/O接口方式,例如Ethernet、USB、CAN、LIN、板卡注入等,支持多种算法开发平台,例如Simulink/C++/Python等。
支持对接ROS/ROS2/CyberRT等主流的自动驾驶软件系统框架。
提供MIL/SIL/HIL/DIL/VIL等多种方式、不同阶段的多物理体在环仿真测试,符合汽车正向研发V模型流程。
4.4 强大的二次开发和联合仿真能力
PanoSim提供全面开放的API,支持用户灵活进行二次开发、第三方系统集成以及测试评价体系的接入,满足多样化的开发和测试需求。通过这些接口,用户可以将自研系统或算法无缝嵌入到仿真平台中,实现深度定制和扩展。
具体支持的对接内容包括被测算法、感知模型、场景模型、交通模型以及评价模型等。被测算法的对接可帮助用户直接验证感知、决策和控制算法的性能;感知模型和场景模型的整合使得用户能够创建更加真实的测试环境;交通模型的接入支持对复杂交通动态的高效模拟;评价模型的对接则助力用户构建个性化的测试评价体系,为自动驾驶系统提供全面的性能分析和验证支持。
目前,基于上述数据接口,PanoSim已经完成了与自动驾驶系统Apollo、Autoware,科学计算与系统建模仿真平台MATLAB Simulink、MWorks,交通仿真软件PTV Vissim,以及场景编辑软件RoadRunner等多类自主系统平台和仿真软件实现联合仿真。并且,支持针对需要联合仿真的软件平台,开发联合仿真数据实时交换模块,完成与指定软件实现数据交换和协同仿真功能。
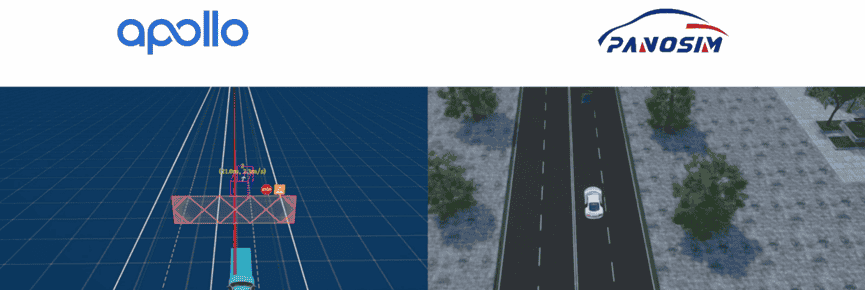


图30 与第三方软件开展联合仿真测试
部分联合仿真实例,请参考GitHub – liyanlee/PanoSim_How_To Part5 Co-Simulation。
4.5 与行业标准的对接能力
PanoSim广泛支持OpenX标准,全面兼容OpenDrive和OpenScenario规范。具体包括:
PanoSim允许用户直接导入OpenDrive格式的路网文件,实现无缝的路网数据集成。
PanoSim能够重放OpenScenario格式的场景文件,兼容OpenScenario标准的1.x和2.0版本,方便用户进行场景测试和再现。
PanoSim支持模拟路采运行方式,通过采集特有的干扰场景和交通流场景,将其输出为OpenScenario格式,从而提升场景的多样性和真实性。
PanoSim支持业界通用的路采数据处理流程,通过与Matlab工具箱和RoadRunner的联动,实现数据预处理、静态场地构建和动态场景提取,最终生成标准化的OpenDrive路网文件、3D资源文件和OpenScenario场景文件,再导入到PanoSim中生成高效复用的仿真场景。
4.6 多智能体交互的联合仿真
PanoSim分布式多主车功能,提供分布式多主车功能,支持在同一个仿真世界中,将多个智能体作为被测对象接入。这些智能体可以在各自独立的软硬件环境中运行,通过分布式总线技术进行实时数据交换,实现多智能体实时交互仿真。
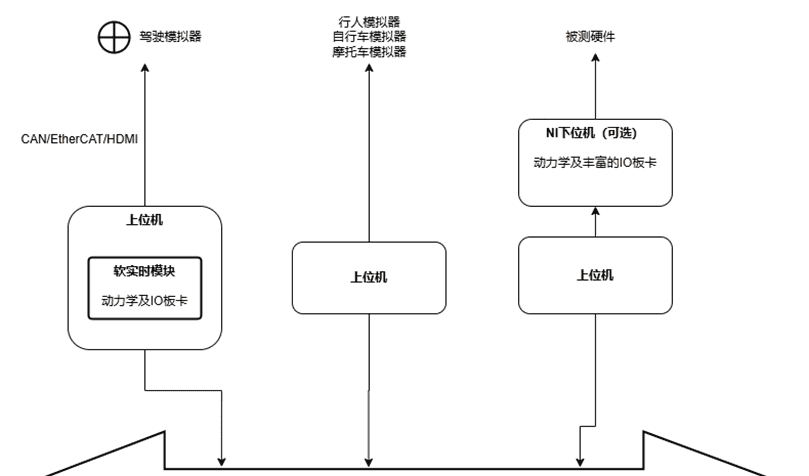
图31 多智能体交互的联合仿真架构
4.7 定制化开发支持和快速响应
系统集成,支持提供专业化、定制化、一体化的智能驾驶、无人驾驶仿真平台解决方案:
支持高精度实时硬件在环测试系统集成应用,包括环境感知系统在环测试、驾驶员在环仿真测试和车辆在环仿真测试等在内的多平台综合解决方案;
能够与dSPACE、NI、ETAS等实时仿真硬件平台无缝集成,配备高精度、高置信度实时仿真模型,为各类智能驾驶应用算法和软硬件系统的自动化测试提供核心工具链支撑;
基于低成本小型模拟器研发平台可实现系统核心实时控制单元、力感模拟单元以及视景仿真单元的模块化、系列化组装与选配,满足基础性智能驾驶技术研发与测试需求;
能够对各种虚拟实验工况和场景进行大批量仿真样本数据的自动生成与智能化真值标定,高效、快速、准确地产成汽车自动驾驶领域所需要的训练数据样本;
可集成高精度地图数据路采设备并结合场景关键要素表达与自动重构方法快速构建出符合不同维度测试需求的三维重建场景,帮助用户提升自采场景数据的使用价值。

图32 提供专业和及时的定制化服务
5.应用场景
PanoSim具有广泛的适用性,其典型应用包括但不限于:
汽车智能辅助驾驶和主动安全等汽车智能化技术和产品的研发、测试和验证(包括自动泊车、自适应巡航系统、车道纠偏、主动避撞、无人驾驶等);
基于汽车行驶环境模拟和车载环境传感器模拟的目标检测、行人检测、道路检测等环境感(认)知及融合算法开发等;
下一代智能交通系统的虚拟研发和测试(车车协同、车路协同、智能行驶与智能交通管理系统等);人-车-路-环境和智能交通等一体化研究等;
离线仿真,实时硬件/软件/模型在环和驾驶员在环(驾驶模拟器)等高效精确仿真;
与汽车底盘和动力总成的性能相关的舒适性和操控稳定性设计、汽车电子控制系统设计(包括ABS/TCS/ARS/ESP等)以及对应产品的虚拟测试和验证等;
电动汽车和混合动力汽车的动力学和动力系统建模、仿真与设计等;
汽车智能驾驶与智能汽车虚拟测试、验证与相关行业标准的制订等;
智能网联汽车教育教学平台和仿真赛事平台。
公司简介
浙江天行健智能科技有限公司(PanoSim)是国内最早从事汽车自动驾驶仿真技术与产品研发、并拥有完全自主知识产权的国家高新技术企业,也是国家智能网联汽车创新中心、美国MathWorks和俄罗斯国家汽车研究院(NAMI)的战略合作伙伴。公司先后获国家双软认证,入选浙江省“专精特新”企业、浙江省高新技术企业研究开发中心,通过国际标准体系ISO9001/ISO27001/ISO20000认证,并先后荣获“智途奖-年度优秀虚拟仿真系统供应商”、“汽车电子科学技术奖-优秀创新产品奖”和“汽车新供应链百强-金辑奖”,入围“腾讯产业共创营出行赛道高估值明星企业”。以 PanoSim 为品牌的系列仿真软硬件产品已在包括美国通用汽车、德国戴姆勒汽车、一汽集团、上汽集团、东风汽车、长安汽车、小鹏汽车、地平线、商泰汽车等在内的国内外企业和科研院所广泛应用并获高度评价,是“中国智能网联汽车算法挑战赛(CIAC)”、“i-VISTA世界虚拟仿真挑战赛”和“世界智能驾驶仿真挑战赛(WIDC)”等国内顶级智能驾驶仿真大赛的官方指定平台(https://www.panosim.com/)。

















暂无评论内容